뉴스레터
뉴스레터








카멜레온이나 도롱뇽 및 많은 두꺼비류는 끈끈한 혀를 자기 몸길이의 1.5배 거리에 있는 곤충을 향해 발사해 10분의 1 초 안에 먹이를 포획한다. 바로 몸 안에 저장된 탄성 에너지를 이용하기 때문이다.
이렇게 재빠른 동작을 로봇에 적용한 시작품 소프트 로봇들이 발표돼 관심을 모은다.
미국 퍼듀대 공대 산업공학 및 생의학 공학부 람세스 마르티네즈(Ramses Martinez) 조교수와 플렉시랩(FlexiLab) 연구팀은 저장된 탄성에너지를 이용해 생체 모방 고출력 및 고속 동작을 재생성할 수 있는 새로운 종류의 매우 유연한 소프트 로봇과 구동기를 개발했다.
고무밴드와 유사한 신축성 있는 고분자를 사용해 제작한 이 로봇들은 압력을 가하면 확장되는 내부 압축공기 경로가 있다. [관련 동영상]

자연에서 영감 얻은 탄성 에너지 활용
로봇의 탄성 에너지는 자연에서 영감을 얻은 대로 제작 과정에서 몸체를 한 방향 혹은 여러 방향으로 늘림으로써 저장된다.
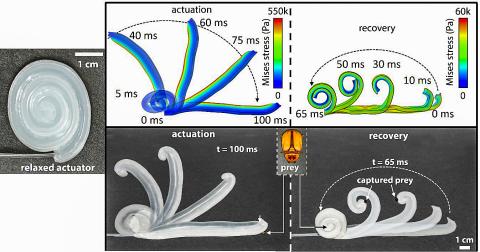
이렇게 미리 응력을 받은(pre-stressed) 공기압 소프트 로봇은 카멜레온의 혀가 뻗어 나가는 것과 유사하게 자체 길이의 다섯 배로 확장돼, 날아가는 딱정벌레를 120 밀리초(1밀리초=1000분의1 초) 안에 포획해 올 수 있다.
마르티네즈 교수는 “카멜레온처럼 빠른 속도로 큰 폭의 동작을 수행할 수 있는 로봇을 만든다면 많은 자동화된 작업을 더 정교하고 훨씬 빠르게 수행할 수 있다고 본다”며, “기존의 로봇들은 통상 관성에 의해 동작이 느려지는 딱딱하고 무거운 구성물로 제작되고 있어 이를 극복하고 싶었다”고 밝혔다.
이 기술은 재료과학 저널인 ‘선진 기능성 소재’(Advanced Functional Materials) 25일 자에 발표됐다. 곤충 잡이 로봇의 동작은 다음 동영상에서 볼 수 있다. [관련 동영상]

자기 몸무게 100배까지 감당
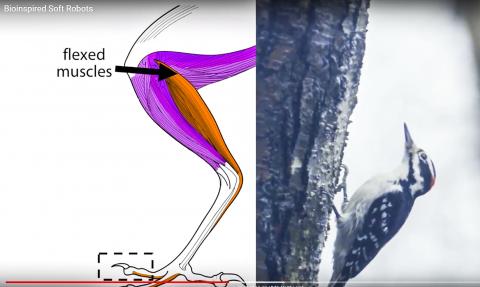
세 발가락 딱따구리 같은 많은 새들은 다리 뒤쪽의 힘을 받는 힘줄에 저장된 탄성 에너지를 사용해 어렵지 않게 나뭇가지에 앉아 있을 수 있으며, 잠잘 때도 횃대에서 떨어지지 않는다.
조류의 해부학에서 얻은 지식을 활용하면 자기 무게의 100배까지 감당하고, 위아래 116도 각도로 매달려 몸체를 유지할 수 있는 로봇 집게 제작[관련 동영상]이 가능하다.
로봇 집게의 유연한 팔이 대상을 잡는 순응성은 접촉면적을 극대화해 움켜쥐는 능력을 향상시키고 고속의 포획을 용이하게 하는 한편, 힘들이지 않고 자세를 잡는 것이 가능하다.
새에게서 영감을 얻은 소프트 로봇 집게로 초속 10mm 속도로 움직이는 공을 65밀리초 안에 잡아낸다. [관련 동영상]
식충 식물의 ‘덫’도 탄성에너지 활용
한편 몇몇 식충 식물들도 ‘포획 메커니즘(trap mechanisms)’에 필요한 고속 운동을 위해 탄성 에너지를 활용한다. 비너스 플라이트랩(Venus flytrap)은 양방향으로 휘어질 수 있는 잎새에 저장된 탄성 에너지를 사용해 먹이가 안쪽으로 들어왔을 때 잽싸게 이파리를 닫는다.
연구팀은 비너스 플라이트랩에서 영감을 얻고 도마뱀이 곤충을 잡는 방법을 연구해 비너스 플라이트랩 소프트 로봇을 만들었다. 이 로봇은 짧은 압력 자극을 받으면 50 밀리초 안에 포획 집게를 오므린다. [관련 동영상]
마르티네즈 교수는 이 새로운 응력 저장 소프트 로봇이 기존의 소프트 로봇 시스템에 비해 여러 가지 중요한 장점을 지니고 있다고 밝혔다.
“차세대 탄성 에너지 소프트 로봇 기초 일궈”
첫째는 다양한 종류의 물체를 고속으로 움켜잡고 그 상태를 유지하거나 조작하는데 탁월하다는 점. 이 로봇들은 탄성 중합체층에 사전 응력을 가해 저장한 탄성 에너지를 사용해 외부 힘을 사용하지 않고도 자기 몸무게의 100배까지 들어 올릴 수 있다.
또 이 로봇들의 부드러운 피부는 미끄럼 방지 미세 스파이크를 쉽게 패턴화할 수 있어 견인력을 크게 높이고 오랫동안 거꾸로 매달려 있을 수 있다. 속도가 빨라 살아 있는 먹이를 쉽게 포획할 수 있다는 것도 장점의 하나다.
마르티네즈 교수는 “이번 시작품에서 제안된 설계와 제조 전략은 기존 로봇으로는 현재 접근이 불가능한 속도와 운동성을 달성할 수 있는, 차세대의 새로운 탄성 에너지 활용 소프트 로봇을 향한 길을 열게 될 것으로 예상된다”고 밝혔다.
- 김병희 객원기자
- hanbit7@gmail.com
- 저작권자 2019-10-30 ⓒ ScienceTimes
관련기사