 뉴스레터
뉴스레터








척추동물은 바다에서 먼저 번성한 다음 육지로 나와 뭍 생활을 시작한 것으로 알려져 있다. 물에서 헤엄을 치던 지느러미가 땅에서 네 다리로 진화해 걷고 뛰게 되었다는 게 진화생물학자들의 시각이다.
동물이 움직이는 데는 다리가 물론 중요하지만 3억6000만년 전 최초의 육상 동물이 물과 뭍이 만나는 개펄과 모래밭이 있는 곳에서 거동하기 시작했을 때는 지금까지 알려진 것과 달리 꼬리가 매우 중요한 역할을 했다는 연구가 8일자 ‘사이언스’(Science)에 소개됐다.
흔히 ‘짱뚱어’로 알려진 아프리카 말뚝망둥어와 이를 닮은 로봇을 만들어 수행한 이번 연구는 미국 과학재단과 육군연구소가 후원하고, 조지아공대와 클렘슨대, 카네기 멜론대의 물리학자, 생물학자, 로봇공학자가 참여해 보기 드문 다학제적 프로젝트로 진행됐다.
생물학, 물리학, 로봇공학자 협동 연구
연구팀은 협동연구 결과 말뚝망둥어와 모양이 비슷하게 생긴 동물들은 변형된 지느러미발을 사용해 평지를 돌아다녔으나 모래언덕을 오르는 데는 꼬리를 이용한 추진력의 도움을 받았다고 밝혔다. 이 같은 연구 결과는 수륙양용 로봇들이 진흙탕에 잘 빠지지 않고, 모래알 같은 알갱이가 많은 경사진 표면도 잘 기동할 수 있도록 디자인하는데 도움을 줄 것으로 보인다.
이번 연구는 말뚝망둥어에 대한 세부 연구와 동물이 움직이는 기술을 활용한 로봇 모델 발전 외에도 알갱이 같은 것이 많은 곳에서의 흐름과 당김의 조건을 조사하고, 당김 연구를 토대로 한 새로운 물리학을 결합한 수학적 모델을 적용해 보는 성과를 거뒀다.
조지아공대 물리학부 댄 골드먼(Dan Goldman) 조교수는 “대부분의 로봇이 경사진 모래 길이 있는 곳에서 움직일 때 어려움을 겪는다”며, “말뚝망둥어들은 앞지느러미를 목발처럼 사용해 모래나 모래 경사길을 지나다니고 장애물을 만나면 앞지느러미와 꼬리를 함께 사용해 경사길을 올라간다”고 말했다. 그는 “우리 로봇 모델은 말뚝망둥어와 유사하게 꼬리와 그 부속기관이 잘 조화를 이루도록 해서 모래 경사길을 올라갈 수 있었다”고 덧붙였다.(동영상 (https://youtu.be/Ho9KXNuDnGU).
생물학 분야에서 연구에 참여한 리처드 블라브(Richard Blob) 클렘슨대 생물과학 석학교수는 “물 속에서 살던 동물들이 땅 위로 올라와 살게 된 것과 같은 우리 역사에서 가장 중요한 진화적 사건 중의 하나를 탐구하는 것은 매우 흥미로운 일”이라며, “그동안 연구자들의 관심이 지느러미에 많이 쏠렸기 때문에 꼬리는 상대적으로 묻혀 있었다”고 말했다. 그는 “동물들이 사용한 몇몇 기능들은 지느러미발과 같이 새로운 것도 있으나 일부 기능들은 새로운 환경에 적응하기 위해 단순히 선택한 것이었다”고 말했다.
당시 블라브 교수실의 박사과정생이었던 샌디 가와노(Sandy Kawano) 연구원은 말뚝망둥어들이 어떻게 다양한 표면 위를 움직이는가를 기록해 골드먼 교수 연구실로 자료와 비디오를 제공했다. 말뚝망둥어는 갯벌이나 진흙과 모래로 이루어진 강 하구에 사는 농어목 망둥어과 물고기로 가슴지느러미와 꼬리를 이용해 물 속과 개펄, 모래 위를 옮겨다니고 갑각류나 갯지렁이를 먹고 산다.
말뚝망둥어 자료를 로봇모델과 수학모델로 분석
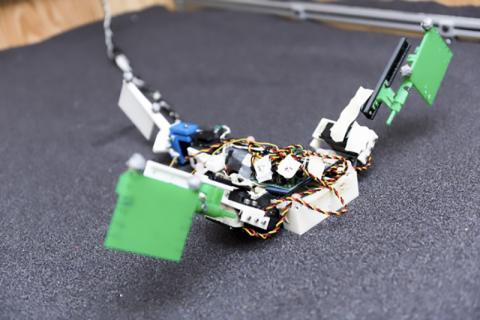
클렘슨대 팀이 전해준 자료들은 당시 조지아공대 학부생이었던 벤저민 매킨로(Benjamin McInroe) 학생이 분석했다. 그는 머디봇( MuddyBot)으로 불리는 로봇 모델에 분석 결과로 얻어진 원리들을 적용했다. 이 로봇은 전기모터로 구동되며 두 개의 지느러미와 강력한 꼬리를 가지고 있었다. 말뚝망둥어와 로봇 연구에서 얻어진 정보들은 다시 카네기 멜론대 연구원들이 제공한 수학 모델에 반영됐다.
현재 캘리포니아 버클리대 박사과정생인 매킨로는 “세 가지 상호보완적인 접근법을 사용했다”며, “말뚝망둥어는 초기 육상동물들의 형태학적, 기능적 모델을 제공했고 로봇에 이 복잡한 자료들을 적용해 단순화시킬 수 있었으며, 매개변수를 다양화해 말뚝망둥어의 움직임에 대한 물리적 기전을 파악했다”고 말했다. 이어 세번 째로 수학적 모델과 그 시뮬레이션을 통해 움직임의 이면에 있는 물리학을 이해할 수 있었다는 것.
말뚝망둥어와 로봇은 둘다 몸의 끌림을 줄이기 위해 몸체를 일으켜서 움직였고, 20도 모래 경사를 오르기 위해 꼬리로 차올리는 힘이 필요했다. 지느러미만을 사용하면 경사를 오르는데 무진 애를 써야 했고 가끔 뒤로 미끄러져 내리기도 했다고 매킨로는 기록했다. 이로 미루어 초기 육상동물들은 지느러미를 정확하게 통제하지 못 했고 모래 경사를 오르기 위해서는 꼬리의 도움이 필요했을 것으로 보고 있다.

물에서 뭍으로 옮긴 데 대한 통찰력 제공
골드먼 교수와 함께 다른 동물들의 움직임을 로봇과 연관짓는 작업을 해온 카네기 멜론대 연구자들은 로봇의 복잡한 움직임을 기술하기 위해 개발한 이론 모델이 자연세계의 움직임을 이해하는데 활용될 수 있다는 것을 증명했다.
카네기 멜론대 로봇연구소 하위 초셋(Howie Choset) 교수는 “말뚝망둥어가 움직이기 위해 어떻게 꼬리와 지느러미발 동작을 통합하는지를 컴퓨터 모델링 도구로 시각화해서 이해도를 높였다”며, “이 작업은 한편으로 로봇이 다양한 경사 영역을 헤쳐나갈 수 있도록 로봇공학을 진일보시켰다”고 평가했다. 이 모델은 이동력을 폭넓게 이해하기 위해 노벨상 수상자인 물리학자 프랭크 윌첵(Frank Wilczek) 박사와 그의 학생인 알프레드 쉐이퍼(Alfred Shapere)가 1980년대에 제안한 얼개를 토대로 만든 것이다.
이번 연구에서 가장 특기할 만한 것은 척추동물들이 어떻게 물에서 뭍으로 옮겨 살게 되었는지에 대한 새로운 통찰력을 제공하고 있다는 점이다.
골드먼 교수는 “생물체가 본질적으로 다른 환경에서 이동력을 갖도록 하기 위해 ‘자연 도태’가 어떻게 이미 주어진 생물체의 구조를 바꿀 수 있는가를 알고 싶었다”며, “헤엄치는 것과 땅에서 걷는 것은 본질적으로 다른 것임에도 초기 육상동물들은 이러한 이행을 만들어냈다”고 말했다.
이번 연구는 물리학과 생물학 및 공학이 힘을 합해 협동연구를 이끌어낸 좋은 사례로 꼽히고 있다. 크래스턴 블래고브(Krastan Blagoev) 미 국립과학재단 물리부문 프로그램 책임자는 “골드먼 교수와 협동연구자들은 동물들이 다른 환경으로 이동하도록 허용하는 물리적 원리를 이해하기 위해 물리학과 공학의 원형적 접근법을 결합했다”며, “살아있는 생물체에 대한 이같은 새로운 접근법은 생물과학에 높은 예견력을 더해주는 한편 전에는 상상해 본 적이 없는 공학적 원리들을 발견해 낼 것으로 기대된다”고 말했다.
- 김병희 객원기자
- kna@live.co.kr
- 저작권자 2016-07-08 ⓒ ScienceTimes
관련기사
