 뉴스레터
뉴스레터

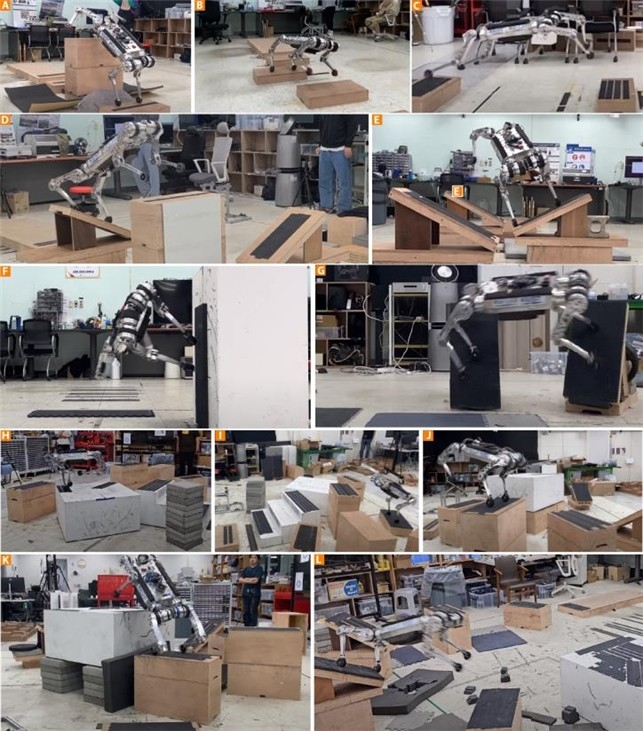
한국과학기술원(KAIST) 기계공학과 황보제민 교수 연구팀은 계단이나 징검다리 등 불연속적인 지형에서도 고속으로 이동할 수 있는 4족 보행로봇 내비게이션 프레임워크를 개발했다고 3일 밝혔다.
4족 보행로봇은 모래, 얼음, 산악 등 다양한 지형에서 보행할 수 있어 감시·정찰 등 업무가 가능하다.
- 연합뉴스
- 저작권자 2025-06-05 ⓒ ScienceTimes
관련기사
KAIST 4족 보행로봇 시속 14㎞로 계단·징검다리도 '거뜬'

글자크기 설정






한국과학기술원(KAIST) 기계공학과 황보제민 교수 연구팀은 계단이나 징검다리 등 불연속적인 지형에서도 고속으로 이동할 수 있는 4족 보행로봇 내비게이션 프레임워크를 개발했다고 3일 밝혔다.
4족 보행로봇은 모래, 얼음, 산악 등 다양한 지형에서 보행할 수 있어 감시·정찰 등 업무가 가능하다.
관련기사
 COPYRIGHT ⓒ KOSAC. ALL RIGHTS RESERVED
COPYRIGHT ⓒ KOSAC. ALL RIGHTS RESERVED
ADD : 06130 서울특별시 강남구 테헤란로7길 22, 4~5층(역삼동, 과학기술회관 2관) 한국과학창의재단
TEL : (02)555 - 0701 / MAIL: sciencetimes@kosac.re.kr / 시스템 문의 : (02) 6671 - 9304 / FAX : (02)555 - 2355
정기간행물 등록번호 : 서울아00340 / 등록일 : 2007년 3월 26일 / 발행인 : 정우성 / 편집인 : 차대길 / 청소년보호책임자 : 차대길
한국과학창의재단에서 운영하는 모든 사이트의 콘텐츠는 저작권의 보호를 받는 바 무단전재, 복사, 배포 등을 금합니다.









