뉴스레터
뉴스레터








최근 과학자들은 팔·다리가 절단된 환자들을 위해 실제 팔·다리와 유사한 로봇의족(lobotic limbs)을 제작하고 있다. 그러나 이 로봇의족을 절단된 부위에 부착해 실제로 살아있는 의족처럼 작동할 수 있도록 하기 위해 뛰어난 수술법이 필요하다.
그동안 의료계는 이 수술법을 개발하기 위해 많은 노력을 기울여왔다. 그리고 최근 과학자·공학자들과 협력해 우리 몸과 연결된 로봇의족이 실제 살아있는 팔·다리처럼 자연스럽게 움직일 수 있는 수술 기술을 개발했다.
31일 ‘사이언스’ 지에 따르면 이 수술법을 개발한 곳은 MIT다. 미디어랩 바이오메카트로닉스 연구팀은 뇌와 로봇의족 간의 신호전달 체계를 구축하기 위해 인공 ‘운동 단위(motor unit)’를 제작하는데 성공했다.
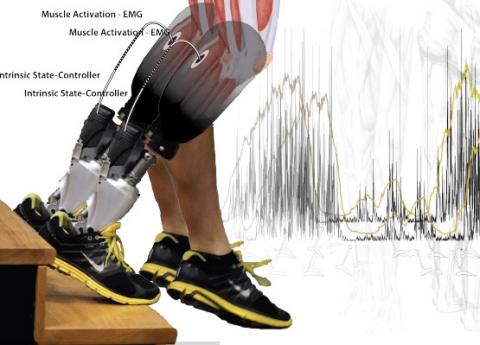
로봇의족으로 힘·속도·위치 조절 가능
운동 단위란 신경세포를 통해 지배되는 다수의 근육섬유에 의해 형성되는 미세한 조직을 말한다. 이 조직을 통해 사람의 팔과 다리를 자연스럽게 움직일 수 있다. MIT에서 이 조직을 제작함에 따라 의료계에 미치는 영향이 클 것으로 예상된다.
이번 연구 결과에 대해 미시건대 근육생리학자 멜라니 어번첵(Melanie Urbanchek) 교수는 “MIT 연구진이 매우 기발한 수술법을 개발했다”며, “이 기술을 통해 수많은 장애인들이 로봇의족을 자연스럽게 움직일 수 있는 길이 열렸다”고 말했다.
최근 로봇의족 기술 발전은 놀라울 정도다. 과학자들은 이 로봇의족을 사람 몸에서 자연스럽게 움직일 수 있도록 하는데 많은 노력을 기울여왔다. 가장 간단한 방법은 절단된 부위에 남아 있는 근육을 부착한 후 그 안에 전극(electrode)을 설치하는 방법이다.
이 전극과 사람의 신경조직을 연결하면 신경조직을 통해 사람 뇌와 로봇의족이 연결돼 운동 신호를 주고받을 수 있다는 판단에서다. 그러나 실제 실험에서는 신경세포로부터 거부 반응이 일어났으며, 로봇의족의 부자연스러운 움직임을 감수해야 했다.
실패가 이어진 것은 팔과 다리를 움직이는 조직이 복잡한데다 매우 예민하게 신호를 주고받고 있기 때문이다. 사람 몸에 로봇 팔을 연결한다고 가정해 보자. 그러기 위해서는 팔꿈치를 구부릴 수 있도록 다양한 근육을 부착해야 한다.
이 근육들을 통해 유동적으로 로봇의족의 힘과 위치, 속도 등을 조절해나갈 수 있다. 그러나 이런 조절이 가능하게 하기 위해서는 팔과 다리를 움직이고 있는 다양한 근육조직을 통제할 수 있는 ‘운동 단위(motor unit)’가 필요하다.
사람 몸에는 1개의 운동뉴런에서 나오는 1개의 운동신경섬유와 그에 의해 지배되는 여러 근섬유가 있다. 이 운동뉴런이 흥분하면 그 지배 하의 근섬유는 거의 동시적으로 흥분한다. 반대로 수축하면 다른 근섬유들도 수축현상을 보인다.
“2년 안에 임상시험에 들어갈 계획”
과학자들은 이와 같은 운동신경섬유와 그 지배하에 있는 근섬유를 한데 묶어 종합적인 기능을 가진 하나의 단위로 간주하고 있다. 이처럼 예민한 조직을 절단된 부위에 봉합하는 데는 다른 어떤 수술보다 더 예민한 수술 과정이 요구된다.
그리고 그 안에 전극을 설치해야 하며 이 전극을 통해 뇌로부터 나오는 다양한 신호들을 주고받을 수 있게 해야 한다. MIT에서는 이 운동뉴런을 대체할 수 있는 기술 ‘agonist-antagonist myoneural interface’를 개발했다.
연구팀은 7마리 쥐에서 채취한 근육과 신경을 활용해 실제 운동단위와 같은 조직을 만들었다. 그리고 그 안에 전극을 부착한 후 장애가 있는 쥐의 몸 안에서 실제로 신호를 주고받으며 실제 운동단위처럼 작동할 수 있는지 실험을 진행했다.
4개월 동안의 테스트를 통해 이 새로운 조직이 쥐의 몸 안에서 완벽하게 봉합됐으며, 뛰어난 치료 효과를 거두고 있다고 밝혔다. 이 논문은 ‘사이언스’ 자매지 ‘사이언스 로보틱스(Science Robotics)' 지 31일자에 게재됐다.
향후 이 기술을 사람에게 적용하기까지는 더 많은 연구가 진행돼야 한다. 연구에 참여한 MIT의 생물물리학자 휴 허(Hugh Herr) 교수는 “팔과 다리를 잃은 장애인에게 로봇의족을 접목할 경우 매우 다양한 요구가 있을 수 있다”고 말했다.
“속도와 힘, 위치 등에 대해 매우 민감한 반응을 소화해낼 수 있어야 한다“며, 이를 위해 후속 연구를 진행할 뜻을 밝혔다. 연구에 참여한 허 교수는 MIT 미디어랩 바이오메카트로닉스 연구팀장으로 장애인이다.
17세 때 등산을 하다가 조난을 당해 양쪽 다리를 절단해야 했다. 그러나 수술과 재활로 몸을 회복한 후 등산을 다시 시작했다. 그리고 학업에 몰두하는 가운데 MIT에서 기계공학으로 석사학위, 하버드 대에서 생물물리학으로 박사학위를 취득했다.
지금은 암벽 등반가이면서 공학자, 생물물리학자로 활발한 활동을 하고 있다. 특히 미디어랩 바이오메카트로닉스 연구팀장으로 장애인의 신체적 능력을 향상시키는데 많은 노력을 기울이고 있다. 특히 재활 분야에서 60여 개의 논문을 발표한 바 있다.
실제로 상용화가 이루어진 인공 무릎, 활동성 발목, 발 보조기 등 10여개 기술에 대한 특허권도 보유하고 있다. 교수는 “향후 2년 간 동물실험에서 사람을 대상으로 하는 임상실험으로 연구를 확대하겠다”고 밝혔다.
- 이강봉 객원기자
- aacc409@naver.com
- 저작권자 2017-06-01 ⓒ ScienceTimes
관련기사