 뉴스레터
뉴스레터








인간은 근골격으로 신체를 움직일 수 있기 때문에 주위 환경에 적응할 수 있고, 때로는 도구를 만들어 사용하면서 사회생활을 할 수 있다. 따라서 인간 생활에 도움을 주기 위한 로봇인 휴머노이드(humanoid) 연구에서 인간이 가진 근골격의 장점을 연구하는 것은 필수적 과정이다.
최근 들어 인간의 행동을 닮은 휴머노이드를 개발하기 위한 경쟁이 선진국을 중심으로 치열하게 전개되고 있다. 이런 상황에서 일본의 과학자들이 실제 인간의 근육과 관절을 모방한 인간형 로봇을 개발중이라는 보도가 전해져 화제가 되고 있다.
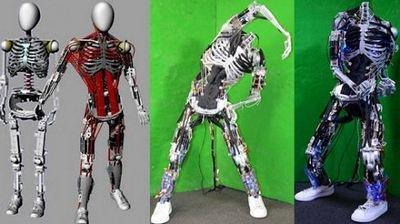
인간의 근육과 관절을 모방한 로봇 켄시로
IT 전문 포털인 엔가제트(engadget)는 온라인 단신을 통해 최근 일본 동경대학에서 인간의 근육과 관절을 최대한 유사하도록 모방한 인간형 로봇인 ‘켄시로(Kenshiro)’를 개발중에 있다고 보도했다.
엔가제트의 보도에 따르면, 켄시로는 인간을 모방한 근골격계 휴머노이드(Musculoskeletal Humanoid)라는 점을 표방하고 있다. 이 로봇은 인간의 근육과 관절을 모방한 실제 작동 원리를 통해 일종의 인공근육 형태를 띄고 있는 것으로 나타났다.
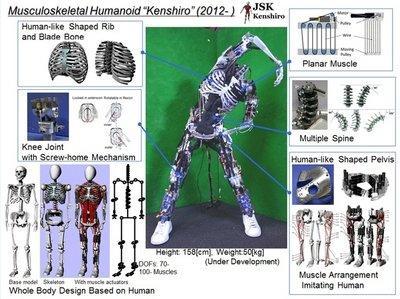
켄시로는 평균 12세의 소년과 동등한 158㎝의 키와 50kg의 몸무게를 가지고 있는데, 인간과 유사한 키와 체중을 반영해 설계한 최초의 로봇으로 업계는 보고 있다. 켄시로는 이 외에도 다리에 50개, 동체에 76개, 어깨에 12개, 목에 22개 등 총 160개의 근육 구조를 통해 인간이 할 수 있는 거의 모든 근육의 움직임을 따라하는 것이 가능하다.
켄시로는 아직 완전한 인간형 단계까지는 이르지 못했다. 하지만, 전문가들은 동작하는 모습이 사람의 행동을 흡사하게 따라하고 있고, 미흡한 부분은 하나씩 보완해 갖춰 나가는 과정을 볼 때 켄시로가 이미 휴머노이드로서 상당한 수준에 이르렀다는 것을 보여주고 있다고 입을 모은다.
현재 켄시로를 개발중인 동경대 JSK(Johou Systems Kougaku Laboratory) 개발팀은 수년 전부터 인체구조를 모방한 바이오 로봇을 연구해 온 것으로 유명하다. 하지만 이번에 공개된 켄시로는 인간과 같은 근골격을 가지고 있다는 점 외에도, 서보 모터를 각 관절에 내장하고 있어 지금까지 선보였던 여러 로봇들과는 개념이 다르다는 것이 업계의 반응이다.
켄시로는 인간 키, 체중을 대비해 설계한 로봇
근골격 휴머노이드는 척추 구조를 가지고 있기 때문에 전신의 유연성을 유지할 수 있고, 복수 근육의 집합을 통해 다양한 관절의 작동구조를 실현할 수 있다. 또한 근육 자체에 탄성요소를 부여하거나 힘을 제어하는 요소를 편입하기가 쉽고, 관절을 조절하는 기구나 전신의 힘을 제어하는 기능도 구성하는 것이 가능한 로봇이다.
하지만 다른 한편으로는 휴머노이드만이 가진 구조의 복잡성과 수 없이 많은 확률의 자유도(DOD, Degree of Freedom) 때문에 로봇의 전신을 조작할 지능영역이 복잡해지고 어려워진다.
또한, 근골격형이 아니면 수행하기 어려운 행동을 인간에 대한 지원 행동으로서 활성화시키기 위해서는, 지능 로봇에 대한 연구도 병행되어야 하므로 이를 창출하고 계승하는 파생 연구도 중요하게 여겨져 왔다.
따라서, 이런 점들을 고려하여 유토 나카니시(Yuto Nakanishi) 박사가 이끄는 동경대 연구팀은 골격과 160개의 근육으로 지금까지의 어떤 로봇보다도 인간의 신체를 가장 가깝게 따라 하고 있는 켄시로를 개발했다.
인간과 유사하려면 통합 제어 시스템 필요
휴머노이드가 인간과 같은 크기의 체격으로 만들어지면 인간이 이용하는 환경이나 물품, 그리고 도구를 취급하는 행동 등이 가능해진다.
하지만 반면에 어떻게 신체의 근골격 구조를 개발할 것인가 하는 점과 전신에 분포하게 되는 100여 가지가 넘는 근육들의 구조 작동 및 그 감각정보를 잇는 전달계 등 로봇 전체를 통합 제어하는 시스템도 필요하게 된다.

이런 점들을 고려할 때 과거부터 지금까지 개발되어 온 근골격형 로봇들인 켄타(Kenta)와 코타로(Kotaro), 그리고 코지로(Kojiro)가 수행해 온 행동사례들은 시사하는 바가 크다.
켄시로의 조상뻘인 이들 중에서 켄타는 10절로 된 등뼈와 몸통에 있는 40개의 근육을 이용하여 몸통을 변형하는 유연성을 가지고 있으며, 시각기능을 통해 물체를 추적하면서 반사적인 좌표유지 행동을 수행했다.
다음으로 코타로는 크랭크를 돌려 자력으로 직립을 유지하거나 자전거를 타고 페달을 밟는 동작을 할 수 있었다. 코지로는 근육 부분의 힘을 코타로보다 10배로 늘려 신체골격의 강도를 높이면서 선 자세의 균형을 이루었고, 몸통과 두 다리에 의한 하반신 보행과 크랭크 동작제어 등이 가능하게 되었다.
주변장치는 휴머노이드 진화의 추진력
현재 동경대의 JSK 개발팀은 전신 골격을 확실한 근골격 구조로 만들 수만 있다면, 2개로 나눠져 진행 인 휴머노이드 플랫폼에 의한 일상생활을 지원하는 행동연구와 근골격 신체를 움직이기 위한 시스템 구성법 연구를 하나한 연구실에서 추진할 수 있을 것으로 보고 있다.
그리고 양 쪽의 연구방법에 공통의 휴머노이드 소프트웨어 기반을 적용시킬 수 있는가의 여부는 신체의 진화를 분명하게 하기 위한 중요한 도전이기도 하다. 근골격 휴머노이드의 모델 바디(model body) 부분은 관절과 그 구동구조, 그리고 근육 주변장치 배치의 다양성 때문에 이들의 위치관계를 파악하는 구조가 꼭 필요하다.
이 외에도 연구진은 소형이지만 다수의 분산배치를 가능케 하기 위해서 현재 근골격 휴머노이드의 주변장치에 많은 액추에이터(actuator)와 센서를 사용하고 있다. 이렇게 되면 여러 손가락을 가진 로봇은 손의 작동을 쉽게 할 수 있어 휴머노이드의 진화에 있어 귀중한 추진력이 될 것으로 기대하고 있다.
- 김준래 객원기자
- joonrae@naver.com
- 저작권자 2013-01-11 ⓒ ScienceTimes
관련기사
