 뉴스레터
뉴스레터








인류의 기원을 찾아 머나먼 행성을 향해 떠나는 SF영화 ‘프로메테우스(Prometheus)’를 보면 미지의 행성을 조사하기 위한 소형 탐사로봇 ‘옵저버(Observer)’가 등장한다.

이 로봇은 양력과 중력을 적절하게 사용하여, 공중에 뜬 채로 행성의 지표를 관측하거나 동굴 속을 탐사하는 미션을 수행한다. 사람의 발길이 미처 닫지 못한 곳곳을 누비며, 사람의 눈과 귀가 되어 귀중한 정보를 알려주는 것이다.
그런데 최근 미 항공우주국(NASA)이 영화 속 옵저버와 유사한 용도의 소형 로봇을 개발 중인 것으로 알려져 화제가 되고 있다. NASA는 8월 30일자 보도자료를 통해 행성 탐사용 비행 로봇을 개발 중이라고 보도하면서, 행성의 조건들이 다 다르기 때문에 개발에 상당한 어려움이 따를 것으로 보인다고 밝혔다. (전문 링크)
비행용 로봇은 주행용보다 제약이 더 많아
지금까지 달이나 화성 등의 탐사에는 바퀴가 달린 주행용 로봇이 많이 사용되었다. 고체 형태인 땅을 딛고 주행하는 것은 가장 보편적인 방법이기 때문에, 액체나 기체 상태의 환경보다는 개발이 훨씬 용이하다.
하지만 행성의 경우 바위가 가로막고 있거나, 구덩이가 파져 있는 경우가 대부분이어서 땅으로 주행하는 방법은 장애물에 의한 행동반경에 제약을 받는 경우가 많았다.
NASA는 이런 주행 로봇의 단점을 해결하기 위해 공중을 비행 할 수 있는 로봇 개발로 시각을 돌렸다. 문제는 이들 행성의 대부분이 대기가 희박하거나, 아예 대기가 없는 환경으로 이루어진 경우가 많아 비행에 어려움이 따른다는 점이었다.

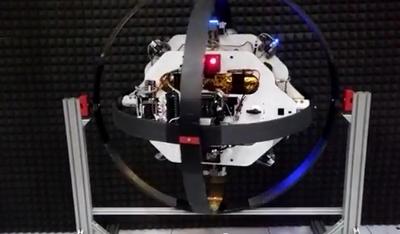
이에 NASA는 대기가 거의 없는 행성에서도 비행 할 수 있도록 가스의 분사를 이용하여 추력을 얻을 수 있는 비행 로봇 개발에 나섰다. EAF(Extreme Access Flyers)라는 이름의 이 비행 로봇은 드론이나 미니 착륙선 모양으로 개발이 진행되고 있다.
EAF를 개발 중인 NASA 케네디 우주 센터 소속의 엔지니어는 “공중을 날 수 탐사용 로봇을 개발하는 일이 그다지 어려워 보이지 않지만, 그런 생각은 우리가 지구에 있기 때문”이라고 설명하면서 “대기가 희박하거나 아예 없는 행성을 날아다니려면 상당한 기술적 난이도가 요구된다”라고 밝혔다.
그는 “더군다나 비행 로봇은 지구에서처럼 눈앞에서 보면서 조작을 하는 것이 아니라, 우주 저 멀리에서 때로는 스스로 작동하면서 위험을 회피할 수 있어야 한다”고 강조하며 “주행 로봇과는 차원이 다른 어려움이 있을 것”이라고 예상했다.
실제로 화성처럼 그나마 조금이라도 공기가 있는 환경에서는 로켓 엔진 이외에 다른 대안도 있지만, 소행성이나 혜성에서 비행을 하려면 별수 없이 로켓 엔진의 힘을 빌어야 한다. 케네디 센터의 연구진은 이런 환경에 대응할 수 있는 다양한 엔진과 로봇들의 디자인을 연구하고 있다.
중력이 작고 대기가 없는 천체는 착륙이 핵심
행성과 같은 극한의 환경에서 활동해야 할 비행 로봇에게 중요한 또 하나의 문제는 통신이다. 기존 탐사의 경우 로봇 조종에 있어 가장 어려웠던 문제가 통신 지연의 문제였기 때문이다.
행성과 지구간에 통신을 할 경우 짧게는 몇 분에서 길게는 수십 분 씩 걸리는 경우가 대부분이다. 이럴 때 기존의 주행 로봇은 응답이 올 때까지 그 자리에서 대기하면 되지만, 비행 로봇의 경우는 계속 날아다녀야 하므로, 배터리와 기타 연료들을 대량으로 소비할 수밖에 없다.
또한 행성에서는 인공위성이 없어서 GPS를 사용할 수 없고, 별도의 통신 기지국도 마련되어 있지 않다. 오로지 자신의 능력만으로 원하는 장소를 관측해야 하기 때문에, EAF에는 자율 비행을 하면서 주위의 지형을 실시간으로 분석할 수 있는 SW를 탑재한다는 것이 NASA의 계획이다.
- 김준래 객원기자
- stimes@naver.com
- 저작권자 2015-09-08 ⓒ ScienceTimes
관련기사
