뉴스레터
뉴스레터








광주과학기술원(GIST)은 9일 인공지능(AI) 융합학과 이규빈 교수 연구팀이 실제 환경의 복잡성을 정밀하게 반영한 세계 최대 규모 로봇 파지(Grasp·집기) 데이터세트 '그래스프클러터6D(GraspClutter6D)'를 구축했다고 밝혔다.
기존 로봇 AI가 단순하고 정돈된 상황에서만 제한적으로 작동했던 한계를 넘어, 물체가 뒤엉킨 현실 환경에서도 안정적으로 동작하는 범용 로봇AI 모델 구축의 핵심 기반을 마련했다는 평가다.
로봇이 물체를 집는 동작은 가장 기본적이면서도 어려운 과제 중 하나로 지금까지의 학습용 데이터세트는 주로 정돈되고 단순한 환경을 전제로 하고 있어 실제 환경 적용에는 한계가 있었다.
여러 물체가 뒤엉켜 있거나 배경이 다양한 실제 상황에서는 로봇의 성능이 급격히 저하되는 문제도 나타났다.
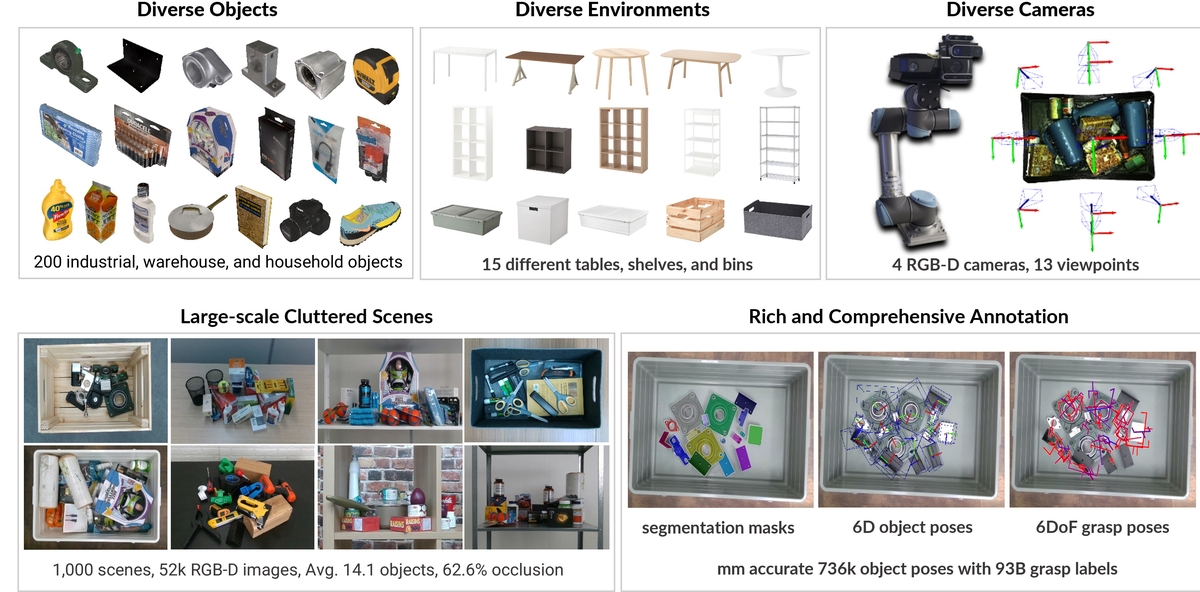
연구팀은 이러한 한계를 극복하기 위해 실제 생활·산업 환경을 정밀하게 재현한 초대형 데이터세트 'GraspClutter6D'를 구축했다.
상자·선반·탁자 등 75가지의 다양한 환경을 구성하고, 로봇팔에 색상·깊이 정보를 동시에 획득할 수 있는 'RGB-D' 카메라 4대를 장착해 총 1천개 장면에서 5만 2천 장의 이미지를 수집했다.
데이터세트에는 실제 물체 200종의 고품질 3D 모델 73만 6천 개의 6차원(D) 물체 자세, 로봇조작과 3D 인식의 핵심개념인 93억 개에 달하는 로봇의 6차원(D) 파지 자세가 포함돼 있다.
연구팀의 성능평가 결과 'GraspClutter6D' 데이터세트로 학습한 AI 모델은 실제 로봇 물체 집기 실험에서 뚜렷한 성능 향상을 보였다.
단순 환경(5개 물체)에서는 집기 성공률이 77.5%에서 93.4%로 향상됐고, 복잡한 환경(15개 물체)에서는 54.9%에서 67.9%로 개선됐다.
'GraspClutter6D'와 관련 도구는 공개 웹사이트(https://sites.google.com/view/graspclutter6d)에서 전 세계 연구자들에게 무료로 제공된다.
이규빈 교수는 "단순히 규모가 큰 데이터세트가 아니라 실제 환경을 충실히 반영한 현실성 있는 데이터세트임을 입증했다"며 "로봇이 현실 세계에서 학습하고 행동하는 것을 목표로 하는 피지컬 AI 연구에도 중요한 기반을 제공하고 향후 물류·제조·생활·서비스 등 다양한 분야에서 로봇 활용을 도약시킬 수 있다"고 말했다.
이 교수가 지도하고 한국기계연구원 백승혁 선임연구원 등이 수행한 이번 연구 결과는 국제학술지 'IEEE 로보틱스 앤 오토메이션 레터스'(Robotics and Automation Letters)에 지난달 20일 게재됐다.
- 연합뉴스
- 저작권자 2025-09-11 ⓒ ScienceTimes
관련기사