 뉴스레터
뉴스레터








공상과학 영화에서나 봤음 직한 일이 현실이 됐다. 소금 한 알보다, 머리카락 굵기보다도 작은 로봇이 스스로 주변 환경을 감지하고, 상황을 판단한 뒤 목적지를 향해 헤엄쳐 간다. 심지어 여러 대가 동시에 움직이면서 각자 다른 명령을 수행하고, 자신이 수집한 데이터를 몸짓으로 전달하기까지 한다.
미국 펜실베니아대학교 마크 미스킨(Marc Z. Miskin) 교수 연구팀은 약 40년 가까이 제자리걸음이던 미세 로봇 분야의 난제를 뛰어넘는 통합형 지능 시스템을 지난해 말 국제 학술지 사이언스 로보틱스에 발표했다.
반도체 제조 기술을 바탕으로 한 이번 연구의 핵심은 '센싱(감지)-생각(연산)-행동(구동)-계산(통신)'이라는 로봇의 4대 기본 기능을 단일 칩 안에 모두 집약시켰다는 점이다. 기존 마이크로 로봇들이 대부분 한두 가지 기능에 특화되어 있던 것과 달리 이 로봇은 완전 자율형 시스템을 구현했다.
하나의 칩 안에 담긴 '생각하는 로봇'
미세 로봇 연구는 오랫동안 ‘진짜 자율성’에서 멈춰 있었다. 로봇 자체는 작게 만들 수 있었지만, 주변을 느끼고, 그 정보를 해석해 스스로 행동을 바꾸는 데 필요한 컴퓨터와 전원, 제어 회로를 모두 그 안에 집어넣는 일은 거의 불가능에 가까웠다. 그래서 지금까지의 마이크로 장치는 주로 외부 레이저나 자기장, 전기장을 쏘아 단순한 움직임만을 유도하는 수준에 머물렀다.
마야 M. 라시터(Maya M. Lassiter) 박사와 동료들은 “‘로봇을 줄이기’보다는 ‘컴퓨터를 줄이자’라는 접근으로 연구를 시작했다.”라고 말했다.
이를 위해 연구진은 반도체 산업에서 쓰이는 CMOS(상보성 금속 산화막 반도체) 공정을 활용해, 로봇의 몸체, 전기 구동기, 센서, 프로세서, 메모리, 통신 회로를 하나의 칩 위에 ‘찍어내듯’ 집적했다. 따라서 이 로봇의 크기는 ‘로봇 한 대의 크기’라기보다 로봇이 태어나는 칩의 물리적 규격으로 이해하는 편이 정확하다. 그 결과 프로그램 가능한 자율 로봇 시스템의 부피를 기존보다 약 1만 배 줄였다고 보고됐다.
온도 재고, 헤엄치고, 신호 보내는 세포 크기 로봇
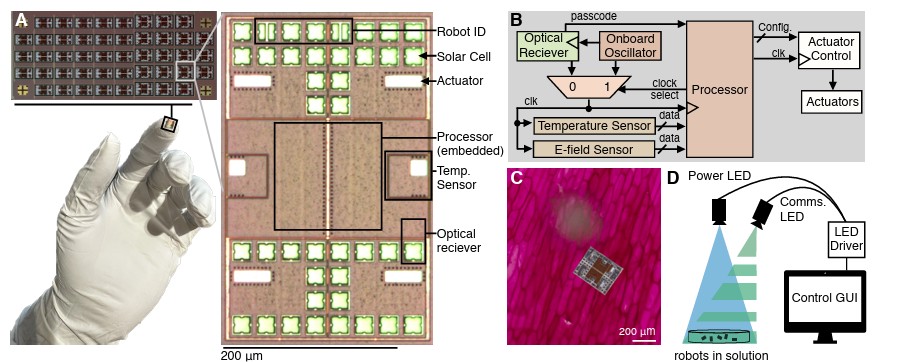
연구진은 로봇에 감지하고, 생각하고, 행동하고, 계산하는 통합 기능을 탑재하기 위해 초소형 ‘온보드 컴퓨터’를 설계했다. 이 컴퓨터는 11비트 명령어 집합을 사용하며 32개의 명령을 저장하는 프로그램 메모리, 네 개의 8비트 레지스터로 구성된 레지스터 파일, 16칸짜리 8비트 데이터 메모리를 품고 있다.
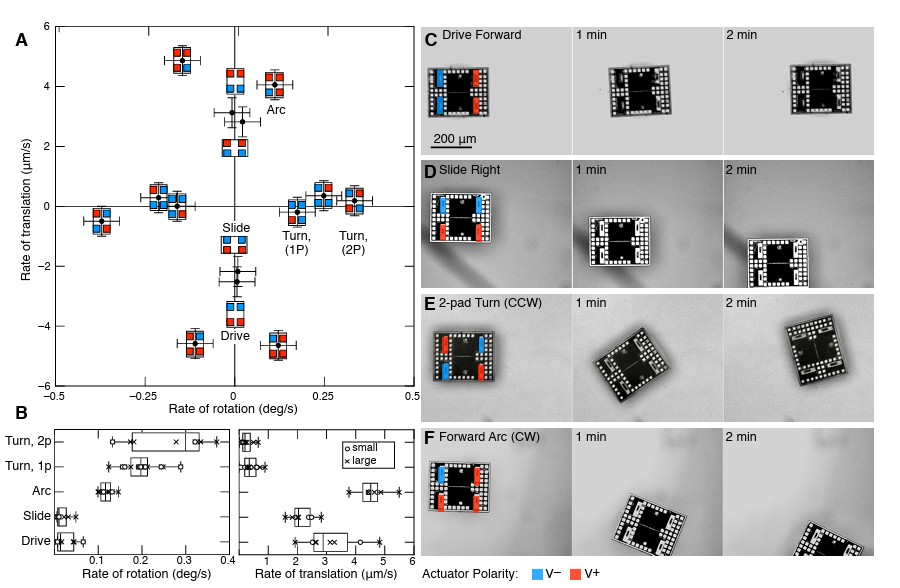
또한, 온보드 프로세서는 주변 온도를 실시간으로 감지하는 센서와 연결돼 있다. 센서가 읽어낸 값을 처리해 다음 행동을 결정하고, 그 결과가 곧바로 움직임으로 이어지도록 설계됐다. 연구팀은 “로봇은 로컬 열 신호에 반응해 회전과 호 그리기 행동을 교대로 수행하며, 보통 1분에 한 번씩 모드를 전환한다”라고 설명했다.
특히 주목할 점은 로봇마다 고유한 식별 코드가 ‘금속 태그 형태의 ID’로 새겨져 있다는 것이다. 이를 통해 여러 로봇이 함께 있어도 특정 개체만 선택적으로 제어할 수 있다. 실제 실험에서는 한 로봇은 정지한 채 다른 로봇만 움직이도록 하는 선택적 제어도 시연됐다.
마크 미스킨(Marc Z. Miskin) 교수는 “반도체 칩의 연산·센싱 능력을 움직이는 몸체와 결합해, 환경 신호에 따라 행동을 바꾸는 마이크로 로봇을 지향한다”라고 밝혔다.
전기로 헤엄치고 몸짓으로 말한다
이 마이크로 로봇의 추진 시스템은 전기화학 액추에이터에 기반한다. 논문에 따르면 로봇 전면과 후면에 배치된 백금(Pt) 전극 사이에 정적 전기장이 형성되면 주변 유체에 흐름이 발생하고, 이것이 전진 동력으로 이어진다. 전극 구성을 조합하면 전진, 시계방향·반시계방향 회전, 좌우 슬라이드 등 다양한 움직임이 가능하다. 또한, '완전 자율' 구현의 핵심은 에너지와 통신 시스템으로 로봇은 광전 전력 수확 시스템을 내장해 외부 광원에서 에너지를 얻는다.
통신 방식은 더욱 독창적으로 설계돼 양방향으로 신호의 송수신이 가능하다. 외부에서는 LED 광원의 깜빡임 패턴으로 명령을 전송한다. 반대로 로봇이 데이터를 보고할 때는 맨체스터 인코딩(Manchester encoding) 방식을 활용한다. 센서로 측정한 값을 내부 레지스터에 저장한 뒤 이를 특정 움직임 패턴으로 변환해 표현하는 것이다. 예를 들어 '1'은 한 방향 이동, '0'은 다른 방향 이동으로 나타내는 식이다.
현미경 영상 분석을 통해 이런 움직임 패턴을 해독하면 로봇의 측정 데이터를 읽어낼 수 있다. 말 그대로 '몸짓 언어'로 소통하는 로봇인 셈이다.
반도체에서 로봇으로의 변신
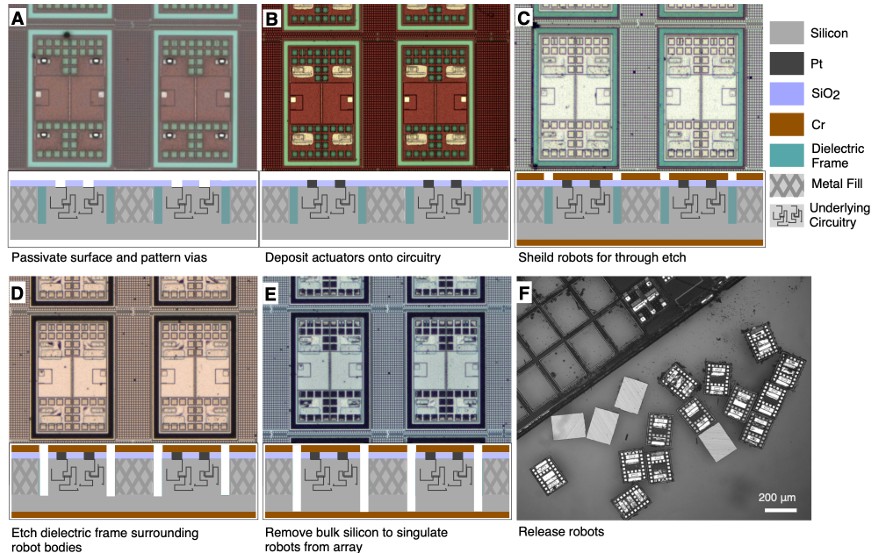
일반적인 반도체 칩을 움직이는 로봇으로 바꾸는 과정은 3단계로 이뤄진다. 연구팀이 개발한 나노제조 공정은 캡슐화(encapsulation), 전기화학 액추에이터 증착(deposition), 릴리즈(release)로 구분된다.
미스킨 교수팀은 "반도체 칩을 마이크로 로봇으로 변환하기 위해서는 일련의 나노제조 단계가 필요하다"고 밝혔다.
특히 연구진은 마지막 릴리즈 단계가 가장 정교하다고 밝히면서 "보쉬 공정(Bosch process)을 이용한 120 사이클의 에칭을 통해 사이클당 440nm씩 제거했다"며 정밀한 공정 조건을 공개했다.
이렇게 완성된 로봇의 성능은 기존 연구를 크게 앞선다. 온도 측정 정확도는 평균 0.2°C로, 기존 마이크로 센서 중 가장 높은 수준이다. 특히 부피 대비 성능에서 압도적 우위를 보인다. 연구팀의 비교·분석에 따르면 이번 로봇은 기존 연구 대비 100분의 1 크기에서도 동등하거나 더 나은 성능을 보였다.
이번 연구는 마이크로 로봇 분야에 새로운 패러다임을 제시할 것으로 보인다. 단순히 작은 크기의 장치가 아니라, 생물체처럼 환경을 인식하고 판단해 행동하는 진정한 자율성을 구현했기 때문이다. 연구진도 의료, 환경, 산업 분야에서 다양한 응용이 기대된다고 밝혔다. 다만, 실제 활용을 위해서는 복잡한 생체 환경에서의 안전성, 대량 생산 시의 품질 관리, 다수 로봇 운용 시의 효율적 제어 전략 등의 과제가 남아 있다. 그럼에도 보충 자료를 통한 상세한 제조법 공개는 이 분야가 '아이디어'에서 '구현 가능한 기술'로 진화하고 있음을 보여주는 긍정적 신호라는 평가를 받고 있다.
- 김현정 리포터
- vegastar0707@gmail.com
- 저작권자 2026-01-21 ⓒ ScienceTimes
관련기사










