뉴스레터
뉴스레터








차세대 화성 탐사 로봇은 지구에서 보내오는 명령을 기다리지 않고 스스로 주변 상황을 판단해 다음 목표물을 정하고 움직이는 능력을 갖게 될 것이라고 스페이스 닷컴이 최근 보도했다.

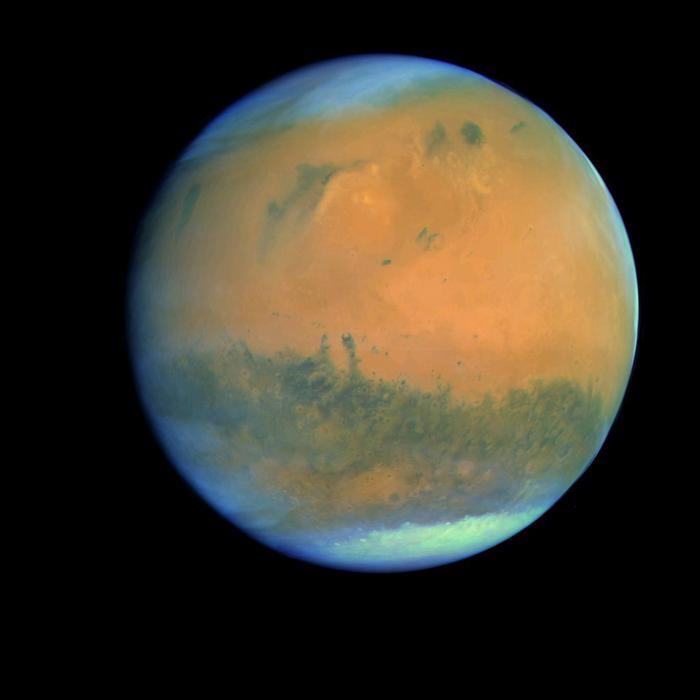
▲ 기존 쌍둥이 화성 탐사로봇 '스피릿'과 '오퍼튜니티'(왼) ;오퍼튜니티'가 2004년에 촬영한 화성 표면 사진에 나타난 물이 흐른 흔적(오) ⓒ연합뉴스
기존 우주선이나 표면 탐사 로봇들은 대부분 인간의 명령에 의존하는데 사람이 어떤 명령을 내릴지 결정하려면 우주선과 탐사 장비가 보내 오는 영상과 정보를 기다려서 수신해야만 한다.
탐사 로봇들은 강력한 안테나를 갖고 있지 않아 '다운링크'로 불리는 이런 과정에는 많은 시간이 걸리고 그 동안 로봇은 하는 일 없이 기다려야 하기 때문에 아까운 장비를 놀리지 않고 활용하자는 것이 과학자들의 생각이다.
미항공우주국(NASA) 제트추진연구소의 데이비드 톰슨 박사 팀이 추진중인 `텍스처 캠'(TextureCam)은 지형지물을 파악해 표면 지도를 작성할 수 있는 컴퓨터 장치이다.
기존 탐사로봇도 자율성이 크게 향상돼 탑재된 내비게이션 소프트웨어를 이용해 최고 1㎞까지 이동할 수 있지만 문제는 이들이 중요한 과학적 연구 대상이 될 수 있는 대상을 지나쳐 가거나 인식조차 하지 못할 수 있다는 것.
따라서 로봇에 기초적인 시각 식별 능력을 부여하면 "건초더미 속의 바늘" 같은 중요한 대상을 놓치지 않게 되며 로봇이 단순한 식별에 성공하면 지구 본부에서 정찰활동의 속도를 높일 수 있다는 것이다.
그러면 로봇은 이동하면서 주변 영상을 계속 촬영하고 내장된 소프트웨어를 이용해 그 중 어떤 것을 지구에 보낼지 우선순위를 결정한다.
로봇은 또 다음 명령을 기다리는 동안 흥미있는 지질학적 대상을 선택해 접근한 뒤 자세한 사진을 찍거나 간단한 화학분석까지도 할 수 있다.
그러면 다음날이면 로봇은 우선순위 목표지점에 가 있게 되고 과학자들은 로봇을 이동시키는데 시간을 낭비하지 않고 로봇이 할 수 없는 고급 수준의 조사에 집중할 수 있게 된다는 것이다.
지난 2010년 화성 탐사로봇 오퍼튜니티가 받은 업그레이드된 소프트웨어 이지스(AEGIS)도 과학적으로 흥미있는 암석들을 식별할 수 있다.
그러나 텍스처캠이 다른 점은 단순히 특정 대상을 따로 보는 것이 아니라 표면 전체의 지도를 작성해 장기간 노출에 의한 침식과 균열 등 지형의 특성을 전체적으로 볼 수 있다는 것이다.
컴퓨터 영상의 '텍스처'는 광범위한 화소 안에 존재하는 통계적 패턴을 가리킨다. 이미 일상적으로 적용되고 있는 이런 기술은 명암이나 색조 차이 등을 통해 사람의 눈에는 잘 드러나지 않는 통계적 특성을 보여 줘 사물을 식별할 수 있게 해 준다.
연구진은 이런 방식은 기존의 육안 식별방식과 효과가 확연히 다르며 텍스처캠에 지질학자들이 분석한 표본들을 보여주고 훈련을 시키면 스스로를 학습시키는 능력도 갖게 된다면서 훈련은 이미 시작됐다고 밝혔다.
기존 우주선이나 표면 탐사 로봇들은 대부분 인간의 명령에 의존하는데 사람이 어떤 명령을 내릴지 결정하려면 우주선과 탐사 장비가 보내 오는 영상과 정보를 기다려서 수신해야만 한다.
탐사 로봇들은 강력한 안테나를 갖고 있지 않아 '다운링크'로 불리는 이런 과정에는 많은 시간이 걸리고 그 동안 로봇은 하는 일 없이 기다려야 하기 때문에 아까운 장비를 놀리지 않고 활용하자는 것이 과학자들의 생각이다.
미항공우주국(NASA) 제트추진연구소의 데이비드 톰슨 박사 팀이 추진중인 `텍스처 캠'(TextureCam)은 지형지물을 파악해 표면 지도를 작성할 수 있는 컴퓨터 장치이다.
기존 탐사로봇도 자율성이 크게 향상돼 탑재된 내비게이션 소프트웨어를 이용해 최고 1㎞까지 이동할 수 있지만 문제는 이들이 중요한 과학적 연구 대상이 될 수 있는 대상을 지나쳐 가거나 인식조차 하지 못할 수 있다는 것.
따라서 로봇에 기초적인 시각 식별 능력을 부여하면 "건초더미 속의 바늘" 같은 중요한 대상을 놓치지 않게 되며 로봇이 단순한 식별에 성공하면 지구 본부에서 정찰활동의 속도를 높일 수 있다는 것이다.
그러면 로봇은 이동하면서 주변 영상을 계속 촬영하고 내장된 소프트웨어를 이용해 그 중 어떤 것을 지구에 보낼지 우선순위를 결정한다.
로봇은 또 다음 명령을 기다리는 동안 흥미있는 지질학적 대상을 선택해 접근한 뒤 자세한 사진을 찍거나 간단한 화학분석까지도 할 수 있다.
그러면 다음날이면 로봇은 우선순위 목표지점에 가 있게 되고 과학자들은 로봇을 이동시키는데 시간을 낭비하지 않고 로봇이 할 수 없는 고급 수준의 조사에 집중할 수 있게 된다는 것이다.
지난 2010년 화성 탐사로봇 오퍼튜니티가 받은 업그레이드된 소프트웨어 이지스(AEGIS)도 과학적으로 흥미있는 암석들을 식별할 수 있다.
그러나 텍스처캠이 다른 점은 단순히 특정 대상을 따로 보는 것이 아니라 표면 전체의 지도를 작성해 장기간 노출에 의한 침식과 균열 등 지형의 특성을 전체적으로 볼 수 있다는 것이다.
컴퓨터 영상의 '텍스처'는 광범위한 화소 안에 존재하는 통계적 패턴을 가리킨다. 이미 일상적으로 적용되고 있는 이런 기술은 명암이나 색조 차이 등을 통해 사람의 눈에는 잘 드러나지 않는 통계적 특성을 보여 줘 사물을 식별할 수 있게 해 준다.
연구진은 이런 방식은 기존의 육안 식별방식과 효과가 확연히 다르며 텍스처캠에 지질학자들이 분석한 표본들을 보여주고 훈련을 시키면 스스로를 학습시키는 능력도 갖게 된다면서 훈련은 이미 시작됐다고 밝혔다.
- 연합뉴스 제공
- 저작권자 2012-07-10 ⓒ ScienceTimes
관련기사