뉴스레터
뉴스레터








지구 저궤도를 돌고 있는 국제우주정거장(ISS)에서 지상 로버를 원격 조종하는 실험이 진행됐다. 지난 11월 25일 유럽우주국(ESA)은 ‘아날로그-1(ANALOG-1)’ 로버가 달 지형을 재현한 실내 장애물 코스에서 2시간 동안 모의 탐사 임무를 성공적으로 마쳤다고 발표했다.
이 실험의 목적은 앞으로 달 궤도에 건설될 우주정거장에서 우주비행사가 달 탐사 로버를 얼마나 효과적으로 작동시킬 수 있는지 확인하기 위한 것으로, 아날로그-1 로버는 월석 및 토양 샘플을 수집해서 조사할 수 있도록 설계되었다.

사람이 로봇을 조종하면 여러 이점 있어
지금까지 달과 화성을 탐사한 모든 로버는 사전에 입력된 소프트웨어 프로그램과 지구에서 오랜 시간이 걸려 전달되는 무선 명령에 따라 제어되었다. 이런 방식으로도 그동안 충분히 효과를 거뒀지만, 임무 변경이나 예기치 않은 상황에 빠르게 적응하기 어렵다는 단점이 있다. 달까지 왕복 무선 통신은 3초가량 걸리고, 화성의 경우에는 최소 6분에서 45분까지 걸리기 때문에 거의 자율적으로 작동해야 한다.
현재의 기술로는 달이나 다른 행성 탐사 계획에서 선택할 방법은 두 가지뿐이다. 우주비행사를 직접 파견하거나, 탐사 로봇을 대신 보내야 한다. 문제는 두 가지 접근 방식에 각자 장단점이 있다는 사실이다.
사람은 로봇보다 훨씬 지능적이고 유연한 신체 능력을 지녔으나, 달이나 화성 표면으로 우주비행사를 보내는 것은 매우 위험하며 비용이 많이 든다. 반면에 로봇은 저렴하고 안전하지만, 사람이 몇 분 안에 달성할 수 있는 일을 처리하기 위해서 몇 주가 걸릴 수도 있다.
ESA 탐사 시스템 그룹의 프로젝트 책임자인 제시카 그레누이(Jessica Grenouilleau)는 “달에 도착해도 월면 활동을 준비하기 위해 몇 시간이 걸린다”라면서 우주비행사와 로봇 시스템을 연결하면 광범위한 작업에서 유연성을 확보할 수 있다고 밝혔다.
포스피드백 기능으로 섬세한 조작 가능해
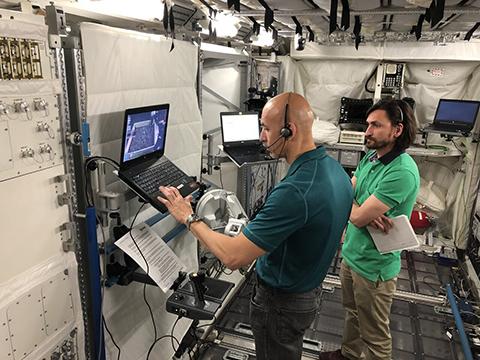
ISS에서 아날로그-1 로버를 조종한 사람은 이탈리아 우주비행사인 루카 파르미타노(Luca Parmitano)였다. 2013년 우주유영 중에 헬멧 안으로 물이 차오르는 사고를 겪었던 것으로 유명한 파르미타노는 800밀리 초의 통신 지연에도 불구하고 로버 조종 임무를 완수했다.
이번 실험은 여러 가지 기술적 목표를 가지고 있지만, 그중에서 가장 중요한 항목은 ‘시그마-7’이라는 포스피드백(force-feedback) 제어장치의 효과를 평가하는 것이다. 고성능 게임용 조이스틱에도 적용되는 이 기술은 로봇 팔이 땅에 닿거나 암석을 집어 올릴 때마다 그 힘을 느낄 수 있어서 정밀한 로봇 제어에 도움이 된다.
ESA의 로봇 공학 책임자인 토마스 크루거(Thomas Krueger)는 “포스피드백 기능을 사용하면 로봇 팔의 느낌을 그대로 전달받게 된다. 만약 깨지기 쉬운 물체를 만지면 감도를 측정하여 전송하고, 작업자는 시그마-7 조이스틱을 통해 느낄 수 있어서 일반 조이스틱보다 더 조심스러운 조작이 가능하다”라고 설명했다.
또한, 아날로그-1 로버는 ‘스폿 터닝(spot turning)’ 기능을 갖춰서 좁은 장소에서도 움직일 수 있다. 덕분에 파르미타노는 난이도 있는 장애물 코스를 쉽게 통과할 수 있었다.

아날로그-1은 ESA가 진행 중인 ‘다목적 로봇 운영 네트워크(METERON)’ 프로젝트의 마지막 단계로, 우주비행사가 태양계를 탐험하면서 사용할 수 있는 로봇과 통신 및 운영 시스템을 테스트하기 위한 목적이다.
로버 개발은 네덜란드에 있는 ESA 소속의 ‘휴먼 로봇 상호작용 연구소(Human Robot Interaction Laboratory)’에서 맡았고, ISS와의 통신 연결은 ‘유럽 우주비행사 센터(EAC)’의 지원을 받았다.
ESA에 따르면, 다음 단계는 내년으로 예정된 지상 야외 테스트라고 한다. 아날로그-1 로버는 앞으로 달 탐사 임무에서 겪게 될 다양한 시나리오를 통해 진짜 암석을 수집하고 조사할 계획이다.
- 심창섭 객원기자
- chsshim@naver.com
- 저작권자 2019-12-06 ⓒ ScienceTimes
관련기사