 뉴스레터
뉴스레터









이런 놀라운 점 때문에 과학자들은 오래전부터 수 mm에 불과한 이 작은 곤충이 어떻게 서로 협력해서 거대한 흰개미탑을 짓는지를 연구해 왔다. 그 결과 흰개미들은 감독이나 설계도 없이도 단순한 신경계를 바탕으로 한 협업을 통해 이런 구조물을 지을 수 있다는 것을 발견했다.
그리고 이런 흰개미의 특성을 이용하여 최근 미국의 과학자들이 감독자인 사람의 지시 없이도 단순한 법칙에 따라 집단적으로 구조물을 지을 수 있는 소형 로봇을 개발했다고 발표해 화제가 되고 있다.
분산형 자율 방식의 흰개미 로봇
공학기술 전문 매체인 ‘Theengineer’는 최근 미 하버드대 와이즈 생체모방 엔지니어링 연구소 소속의 과학자들이 흰개미와 비슷한 방식으로 구조물을 건설하는 로봇을 개발했다고 보도하면서, 이 로봇들이 앞으로 재난 지역이나 우주공간과 같은 위험한 환경에서 건설 임무를 수행할 수 있을 것이라고 전망했다.
하버드대 연구진에 따르면 이 흰개미 로봇은 길이 18㎝의 소형으로서 아주 가까운 부분만 감지할 수 있는 반면에, 로봇 상호 간의 제한된 신호만 받을 수 있도록 설계되어 일부 로봇들이 작업 중 고장이 나도 나머지 로봇들은 작동을 계속하여 임무를 완수할 수 있는 분산형 자율 프로그램이 적용된 것으로 나타났다.
연구진은 분산형 자율방식의 로봇 시스템이 때로는 매우 복잡하고 정교한 첨단 로봇 시스템을 능가하는 경우가 있음을 환기시키면서, 아무리 높은 수준의 복잡한 명령을 수행하는 로봇이라 하더라도 로봇 시스템에 문제가 생기면 모든 작업이 허사가 될 수 있기 때문인 점을 지적했다.

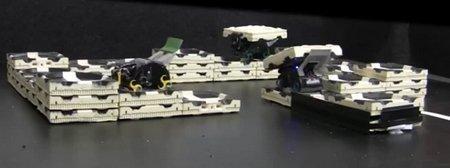
테르메스(TERMES)라고 명명된 프로젝트를 통해 개발된 흰개미 로봇은 이전까지의 로봇들과는 확연히 다른 시스템으로 인상적인 건설작업을 수행할 수 있는 것으로 알려졌다. 이들은 로봇들끼리 자율적으로 협력하면서 레고 블럭 같은 건축 자재를 이용하여 탑이나 성, 벽 등을 건설할 수 있다.
연구진이 흰개미 로봇들을 테스트해 본 결과 어떠한 감독이나 지시도 없이 스스로 특정한 모양의 구조물을 건설했고, 특히 중간에 블록이 사라지거나 추가되는 문제가 생겨도 이에 구애받지 않고 특정 구조물을 계속해서 건설할 수 있다는 점을 확인했다.
이와 관련하여 흰개미 로봇 프로젝트의 리더인 하버드대의 라드히카 나그팔(Radhika Nagpal) 교수는 “우리가 흰개미로부터 받은 가장 중요한 영감 중 하나는, 로봇들이 감독자의 지시 아래 복잡한 시스템을 이루지 않더라도, 어떻게 진행해야 하는지에 대해 모두와 상의할 필요없이 환경 변화에 맞춰서 일하면 된다는 점을 파악한 것”이라고 말했다.
그러면서 나그팔 교수는 “공사를 할 때 벽돌을 운반하고 전략적으로 위치를 정해 놓는 것처럼, 로봇은 자체적으로 중요한 경로를 막지 않고 건설 과정을 진전시키기 위해 다음에 진행될 건설 지점에 계단과 벽돌을 건설할 수 있다”고 덧붙였다.
사회성 곤충들이 가진 스티그머지 메커니즘
분산형 방식의 프로그램으로 설계돼 있어서인지 각각의 흰개미 로봇이 가진 기능은 사실 별 볼 일 없다. 적외선과 초음파, 그리고 고도 및 촉각 등을 담당하는 4개의 센서와 3개의 전동기 등 단순한 구조로 이루어져 있고, 기능 또한 블록을 들어서 옮겨다 내리는 등 단순한 업무만 할 수 있도록 개발되었다.
그러나 여기서 중요한 것은 흰개미나 꿀벌과 같은 사회성 곤충들이 가지고 있는 스티그머지(stigmergy)라는 자율 메커니즘을 활용한 알고리즘을 로봇에 프로그래밍했다는 점이다. 여기서 스티크머지란 흰개미가 구조물을 짓는 것처럼 주변 상황에 남겨진 정보로 협동을 끌어낼 수 있다는 개념이다.
예를 들어 흰개미는 구조물을 짓기 위해 흙을 운반할 때 목표지점에 이미 흙이 차 있으면 자연스럽게 옆쪽으로 가서 흙을 내려놓는 행동을 보인다. 이런 행동양식은 자기 앞에 있는 흰개미가 남긴 화학물질과 흙이 쌓여가는 모양 등에 의해 발생되는 것으로 분석됐다.
또한 흰개미들의 이런 행동양식은 짓고 있는 구조물의 전체적인 공정 수준이나 다른 흰개미들의 상태를 전혀 모르는 상태에서 일을 하도록 만들지만, 결국에는 각 개체의 크기를 고려했을 때 엄청난 규모의 구조물을 만들어낸다.
이에 대해 나그팔 교수는 “현재까지 원격조정을 통해서 여러 가지 작업을 하는 로봇들은 다수 존재하고 있지만, 사람이 일일이 조정하거나 혹은 오작동을 하지 않는지 계속해서 감시가 필요하다”면서 “따라서 흰개미 로봇처럼 누구의 지시 없이도 협업해서 더 복잡한 일을 해내는 기능은 앞으로 응용의 여지가 많은 매우 중요한 점”이라고 강조했다.
나그팔 교수는 “흰개미 로봇들은 하나의 로봇이 오작동을 일으켜 엉뚱한 곳에 블록을 쌓더라도 다른 로봇들이 이를 끊임없이 수정할 수 있으며, 수많은 로봇이 동시에 작동해도 누군가 이를 조절할 필요가 없다는 장점이 있다”며 “다수의 로봇을 작업에 투입해야 한다면 기존 로봇들과 비교할 때 어느 쪽이 우월한지는 너무나 자명하다”고 밝혔다.
이번 연구의 공동 책임자인 하버드대의 저스틴 베르펠(Justin Werfel) 박사는 흰개미 로봇의 활용과 관련하여 “흰개미 로봇을 당장 화성에 보낼 수는 없지만, 지구의 홍수 지역에 모래주머니를 쌓는 작업에 투입하는 것은 어렵지 않을 것”이라며 “로봇의 원래 역할처럼 더럽고 위험하고 지루한 일을 하는 데 흰개미 로봇은 효과적”이라고 밝혔다.
한편 이번 연구와 관련하여 독일 프라이부르크대학의 유디스 코브(Judith Korb) 박사는 “흰개미 로봇이 생명체의 연구나 진화 메커니즘에 대한 연구에도 이용될 수 있다”면서 “가령 흰개미 로봇을 통해 곤충들이 최적의 방식으로 일을 해내는지 테스트할 수 있으며, 이 외에도 진화의 방향이 최선은 아니지만 최적의 해법을 쫒는 식으로 발전했을 것이라는 점을 입증할 수 있을 것”이라고 말했다.
- 김준래 객원기자
- joonrae@naver.com
- 저작권자 2014-02-25 ⓒ ScienceTimes
관련기사
