뉴스레터
뉴스레터








재난 현장에서 건물에 갇힌 생존자를 찾거나, 전쟁터에서 적이 숨어있을지 모를 건물 안을 수색할 수 있는 새로운 드론 기술이 개발됐다. 기존에 사용되던 고성능 대형 드론이나 로버가 아닌, 제한된 성능의 소형 드론을 활용한 점이 특징이다.
네덜란드의 델프트 공과대학(TU Delft)과 라드바우드 대학(Radboud University), 그리고 영국 리버풀 대학(University of Liverpool) 공동 연구팀이 알려지지 않은 환경을 자율적으로 탐험할 수 있는 군집 드론 기술을 개발했다. 이 연구는 4년간 네덜란드 국립과학재단 ‘NWO 자연 인공지능 프로그램(NWO Natural Intelligence Program)’의 지원을 받아 진행된 것으로, 지난 23일 ‘사이언스 로보틱스(Science Robotics)’ 저널에 발표됐다.

곤충 떼에서 영감을 얻어
연구원들은 미지의 환경을 샅샅이 수색할 수 있는 소형 드론 기술을 개발하면서 난관을 겪었다. 작은 드론은 건물 내부처럼 좁은 공간을 쉽게 이동할 수 있지만, 감지 및 계산 능력이 극도로 제한된 상태에서 자율적으로 비행해야 하기 때문이다. 이 문제를 해결하기 위해 곤충 떼가 주변을 탐색하는 원리를 응용했다.
여러 대의 소형 드론을 활용하면 한 대의 대형 드론보다 더 빨리 건물 내부를 수색할 수 있다. 다만 개별 드론의 탐지 능력이 떨어지기 때문에 각 개체의 유기적인 연대가 필요하다. 중복 수색을 줄이기 위해 한 대의 드론이 같은 방향으로 비행하는 다른 드론을 발견하면 방향을 바꾸거나, 우선순위에 따라 해당 방향으로 향할 드론을 정하게 된다.
새로운 탐색 알고리즘 개발
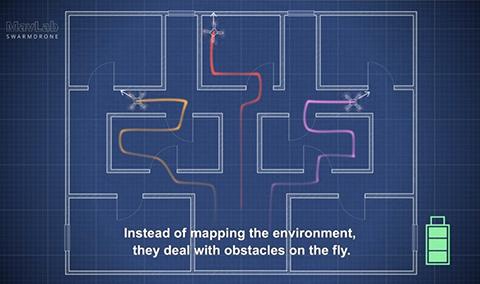
연구를 수행한 킴벌리 맥과이어(Kimberly McGuire) 박사는 곤충을 모방한 탐색 알고리즘을 소개하면서 “곤충 알고리즘은 탐색한 환경의 지도를 만드는 것뿐만 아니라, 장애물을 즉석에서 처리한다”라고 밝혔다. 미리 공개된 상세 지도는 최적의 이동 경로를 설정하는데 매우 편리하지만, 내부의 변화 상황을 즉시 반영하기 어렵다.
제한된 수준의 곤충 알고리즘은 효율성이 떨어지지만, 작은 드론에도 구현할 수 있어서 현장 적응력이 더 뛰어나다. 실제로 곤충은 매우 상세한 지도를 만들지 않는다. 대신, 먹이가 있는 곳과 보금자리처럼 중요한 장소만을 기억하고 이동할 뿐이다.
이 프로젝트의 수석 조사관인 귀도 크로운(Guido de Croon) 박사는 “새로운 탐색 알고리즘의 기본 개념은 우리의 기대를 극단적으로 줄이는 것이다. 단지 자율 드론이 기지국으로 돌아갈 수 있도록 요구할 뿐이다”라면서 “드론 무리는 우선 각각의 드론이 선호하는 방향으로 향하도록 함으로써 퍼져 나간다. 탐사가 끝나면 드론들은 기지국이 위치한 무선 신호기로 돌아온다”라고 말했다.

간단한 무선칩 설치로 회피 비행 가능
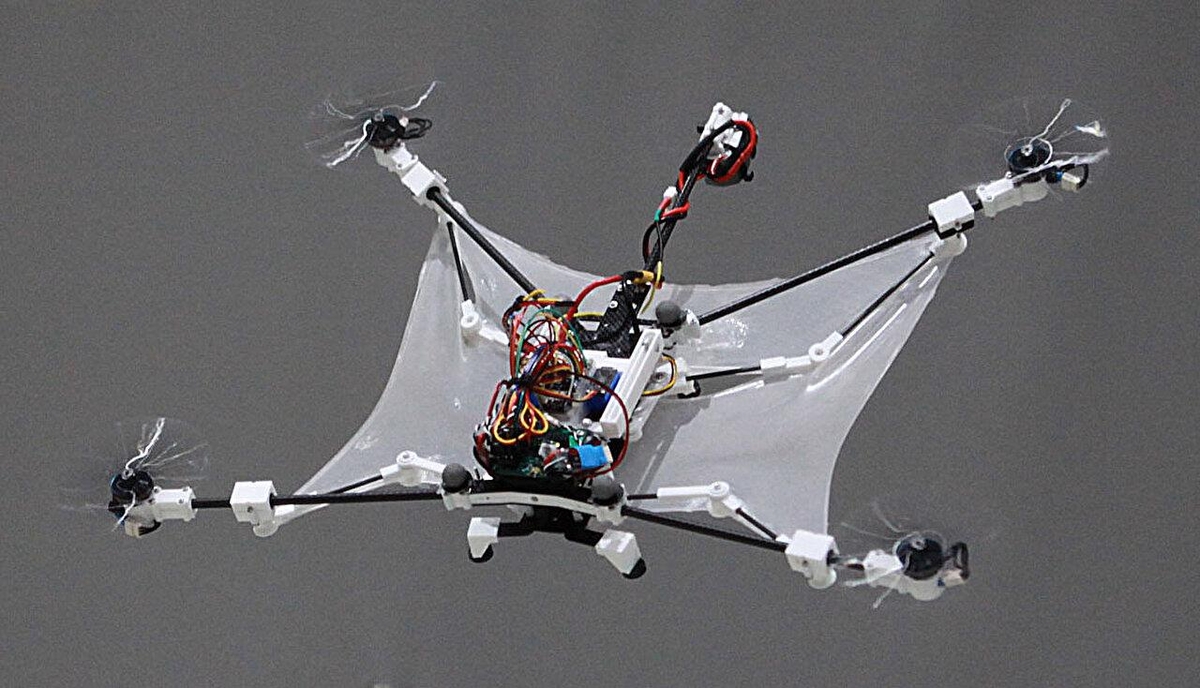
실험에 사용된 드론의 무게는 고작 33g에 불과하다. 이처럼 작은 드론에 센서와 연산 장치 및 통신기, 배터리를 넣으려면 기능을 최소한으로 줄여야 한다.
맥과이어 박사는 “군집 탐사에 있어 가장 큰 어려움은 개별 드론의 정보 처리 능력이었다. 연구 초기에는 속도 조절, 장애물 회피 등 기본적인 비행 능력을 확보하는 데 주력했다. 그 후 소형 드론이 서로 탐지하고 피하는 방법을 고안해냈다”라고 소개했다.
연구팀은 드론끼리 회피하는 기술을 매우 간단하게 해결했다. 각각의 드론에 무선 통신용 칩을 설치한 다음, 이 칩들 사이의 신호 강도를 측정해서 근접 여부를 알아내는 방식이다. 흔히 볼 수 있는 WiFi 공유기에서 멀어질수록 신호 막대가 줄어드는 것과 같은 원리다. 이러한 방법의 장점은 드론에 별도의 장치를 설치하지 않아도 되고, 연산도 거의 필요 없다는 것이다.

군집 탐사 드론의 이점 확인
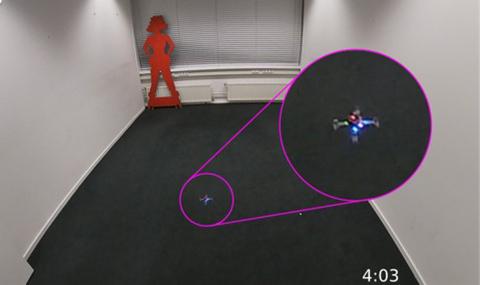
군집 드론은 실내를 수색하는 재난 시나리오에서 좋은 결과를 보여줬다. 카메라를 장착한 6대의 소형 드론이 8개의 열려있는 방 중에서 7개의 방을 6분 만에 탐색했고, 두 명의 생존자를 가정한 모의 표적을 모두 찾아냈다. 만약 한 대의 대형 드론이었다면 불가능했을지도 모른다.
이러한 결과는 군집 탐사의 이점을 분명히 보여준다. 일부 중복 수색도 있었는데, 오히려 유용한 것으로 밝혀졌다. 드론 한 대가 생존자를 찾았지만, 카메라 고장으로 아무런 영상도 보여주지 못했다. 다행히 또 다른 드론이 생존자를 카메라에 담았다.
이 기술이 실용화되면 앞으로 붕괴 직전의 건물과 같은 재난 현장에서 작은 드론들을 풀어 수색할 수 있을 것이다. 드론 무리가 먼저 건물 안으로 들어가 탐사를 한 뒤 관련 정보를 갖고 기지국으로 돌아오게 된다. 그 후 구조 대원들이 생존자가 있을 가능성이 높은 지역부터 구조 활동을 펼칠 수 있다.
연구팀은 지금까지 군집 드론을 이용한 탐사 기술 연구가 없었다면서, 로봇 공학 분야에서 중요한 의미를 지닌다고 밝혔다.
- 심창섭 객원기자
- chsshim@naver.com
- 저작권자 2019-10-29 ⓒ ScienceTimes
관련기사