 뉴스레터
뉴스레터








별도의 도구를 사용하지 않는 한, 사람이 벽을 기어 오르고 물 위에서 걷듯이 움직이는 것은 불가능한 일이다.
반면에 이 같은 동작을 아주 쉽게 해치우는 존재가 있다. 바로 바퀴벌레다. 때문에 많은 과학자들이 이런 바퀴벌레의 놀라운 운동 능력을 규명해 보기 위한 노력을 아끼지 않고 있다.
미 하버드대에서 로봇을 연구하는 과학자들도 그 중 하나다. 이들은 바퀴벌레가 가진 운동 능력을 로봇에게 이전시켜 생체모방 로봇의 새로운 모델을 제시하는 연구에 집중하고 있다. (관련 기사 링크)
자기장 이용하여 금속으로 된 벽 오를 수 있어
바퀴벌레는 대부분의 사람들이 꺼려하는 곤충이다. 혐오스럽게 생긴데다 가공할만한 생존력까지 지니고 있어서, 모두가 피하고 싶어하는 곤충의 대표격이라 할 수 있다.
하지만 과학자의 입장에서 보면 바퀴벌레는 경이로운 대상이다. 불사신처럼 질긴 생명력으로 생물학자들을 감탄하게 만들고, 뛰어난 운동 능력으로 엔지니어들에게 신선한 아이디어를 제공해 주기 때문.
하버드에서 로봇을 연구하는 과학자들도 현재 바퀴벌레가 주는 영감에 푹 빠진 상태다. 이들은 바퀴벌레가 가진 기본적인 능력에다 다른 곤충들의 장점을 더하는 연구를 진행하면서 이전 로봇들에게서는 볼 수 없었던 새로운 기능의 생체모방 로봇을 개발하고 있는 중이다.
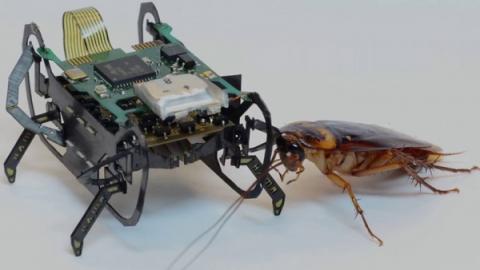
HAMR(Harvard Ambulatory MicroRobot)라는 이름의 이 로봇은 바퀴벌레와는 달리 다리가 4개에 불과하지만, 바퀴벌레의 다양한 운동능력을 최대한 반영시킨 생체모방 로봇이다.
무게 2.79g에 길이가 4.5cm에 불과한 마이크로 로봇이지만, 초당 몸길이의 4배인 17.2 cm/s의 속도로 이동이 가능하다. 또한 진짜 곤충처럼 직진과 후진은 물론, 좌우로도 걸을 수 있다.
특히 최근에는 새로운 패드를 다리에 장착하여 벽을 기어 오를 수 있는 ‘HAMR-E’라는 이름의 업그레이드 모델이 나와 눈길을 끌고 있다. E는 ‘Electro-adhesion’의 약자로서 벽에 달라 붙어 기어 오르는 특징을 뜻한다.
HAMR-E가 바퀴벌레를 많이 모방했지만, 벽을 기어 오르는 메커니즘 만큼은 확연한 차이가 난다. HAMR-E는 폴리이미드(polyimide)라는 고분자로 절연한 구리 전극을 자기장으로 이용해서 금속 표면에 달라붙을 수 있다.
이에 대해 하버드대 관계자는 “분명한 것은 HAMR-E 모델이 바퀴벌레나 다른 곤충처럼 아무 벽이나 타고 이동할 수 있는 것은 아니라는 점”이라고 강조하며 “다만 벽면이 금속으로 되어 있다면 얼마든지 가능하다”라고 밝혔다.
연구진은 HAMR-E 모델의 성능을 파악하기 위해 제트 엔진 내부처럼 곡면인 구조물에서도 제대로 기어오를 수 있는지를 테스트했다. 그 결과, 곡면으로 된 벽은 물론 심지어 꺼꾸로 매달린 상태에서도 이동이 가능한 것으로 나타났다.
바퀴벌레 로봇의 테스트 시연에 참여한 영국의 롤스로이스는 이 같은 사실에 주목하고 있다. 크기를 조금만 더 줄이면 항공기 엔진 안으로 기어들어가서 내부를 확인하는 용도로 충분히 활용할 수 있다는 판단이다.
항공기 엔진 제조를 주력으로 하는 이 회사는 엔진 속의 각종 파이프나 배선 등을 점검하기 위해 매번 엔진을 분해했다가 조립하는 번거로운 작업을 되풀이 하고 있다.
따라서 마이크로 로봇을 이용하여 엔진 내부 상태를 파악할 수 있다면, 매번 분해를 하지 않아도 되므로 작업 효율을 높일 수 있다.
이에 따라 하버드대 연구진은 현재 바퀴벌레 로봇의 길이를 1.5cm까지 줄이는 연구에 몰두하고 있다. 이 정도 크기로만 바퀴벌레 로봇을 줄일 수 있다면, 엔진 내부를 구석구석 돌아다니며 사람이 5시간 동안 할 일을 5분 만에 해낼 수 있다는 것이 롤스로이스 측의 생각이다.
표면장력 이용한 수륙양용 로봇도 개발
하버드대 연구진은 바퀴벌레 로봇에 벽을 기어 오르는 기능 외에도 소금쟁이처럼 물 위를 걷는 기능까지 부여하는 연구를 진행 중이다.
원래 모델보다 무게를 40% 줄인 1.65g 정도의 바퀴벌레 로봇은 다리에 붙은 네 개의 패드를 이용하여 물 위에 뜰 수 있도록 개발되었다. 표면장력의 원리를 이용하여 초당 10회 정도 다리를 움직이며 전진할 수 있는 것이다.
무게와 크기를 줄인 이유에 대해 하버드대의 ‘닐 도쉬(Neel Doshi)’ 박사는 “물 위에서는 무게와 크기가 로봇의 성능에 결정적인 영향을 준다”라고 설명하며 “원래 크기의 HAMR이라면 표면 장력으로 지탱하기 어렵다”라고 밝혔다.

연구진은 물 위를 걷도록 만든 바퀴벌레 로봇을 수륙양용 모델로 개발한다는 계획이다. 육상에서처럼 물에서도 걸을 수 있도록 한다면 수면 아래의 장애물을 피하고, 항력을 배제할 수 있기 때문이다.
독특한 점은 바퀴벌레 로봇의 발에 붙인 패드에 전류를 흘리면 표면 장력이 깨지면서 로봇이 물 속으로도 들어갈 수 있다는 사실이다. 그렇게 되면 필요할 때 물방개처럼 물 속에서 움직일 수도 있다.
이에 대해 도쉬 박사는 “전력을 제공하여 바퀴벌레 로봇이 수면 아래로 잠수하고 나면, 지상과 동일한 운동 방식을 사용하기 때문에 땅 위와 마찬가지로 원활한 보행을 할 수 있다”라고 말했다.
- 김준래 객원기자
- stimes@naver.com
- 저작권자 2019-01-07 ⓒ ScienceTimes
관련기사
