뉴스레터
뉴스레터








인류 탄생의 비밀을 찾아 다른 행성을 탐사하는 SF영화 ‘프로메테우스(Prometheus)’를 보면 미지의 행성을 조사하기 위한 도구로 드론을 사용하는 장면이 등장한다.
‘옵저버(Observer)’라는 이름의 이 드론은 양력과 중력을 적절하게 사용하여 비행하면서, 행성의 이곳저곳을 조사하는 임무를 수행한다. 특히 탐사대원과 함께 처음 방문하는 동굴을 탐사할 때, 순식간에 내부를 스캔하여 3차원 입체 지형 관련 정보를 제공함으로써 관객들의 눈길을 사로잡았다.

그런데 최근 호주의 과학자들이 옵저버와 같은 기능을 수행하는 드론을 개발 중인 것으로 알려져 화제가 되고 있다. 첨단기술 전문 매체인 뉴아틀라스(Newatlas)는 호주의 자원 채굴에 도움을 주는 드론이 개발되고 있다고 보도하면서, 자원 채굴 외에 인명 구조 용도로도 활용될 것으로 보인다고 밝혔다. (관련 기사 링크)
협소 공간에서 비행하려면 라이다 시스템 필요
드론의 역할 범위가 날로 확대되고 있다. 탄생 초기만 하더라도 취미생활이나 공중촬영 같은 단순 역할에 국한됐지만, 이제는 사람이 직접 들어가서 확인하기 어려운 붕괴 현장이나 동굴 내부 등 협소 공간에서 탐색하는 작업 등에도 투입되고 있다.
문제는 이같은 탐색 작업을 벌이려면 일반적 기술로는 어렵다는 점이다. 보통의 드론을 동굴이나 갱도 같은 협소 공간에서 띄우게 되면, 대부분 벽에 부딪혀 추락하고 만다. 공중을 날고, 촬영하는 기술만으로는 협소 공간을 비행하기가 어려운 것이 현실이다.
따라서 좁은 공간에서도 벽에 부딪히지 않고 비행하기 위해서는 자율주행 자동차에 적용하는 ‘라이다(Lidar) 시스템’ 및 ‘충돌방지 센서’ 같은 첨단 기술이 탑재되어야 한다. 라이다 시스템은 주변으로 무수한 레이저빔을 발산하여 레이저 펄스가 되돌아오는 시간이나 위상차 등을 계산, 이를 통해 주변 대상물의 위치정보를 확보한다.
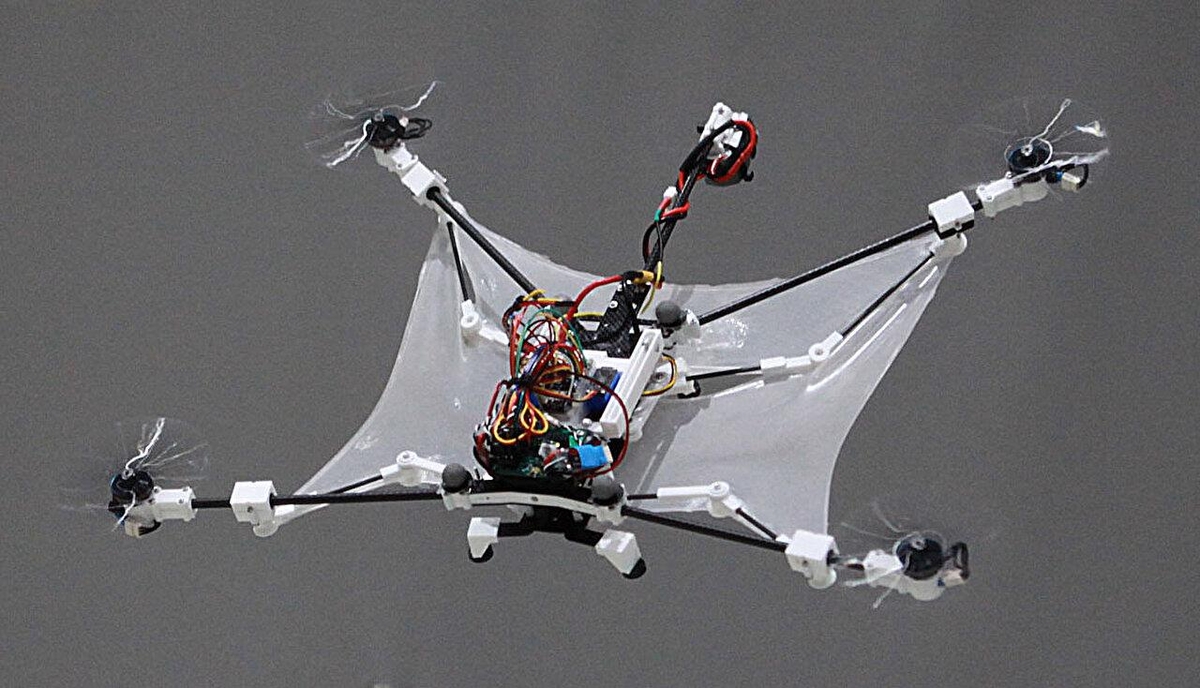
호주연방과학원(CSIRO) 출신의 과학자들은 드론에 라이다 시스템을 적용했다. 이들은 스타트업인 에머슨트(Emesent)를 설립한 뒤, 라이다 시스템 및 충돌방지 센서를 장착한 드론인 호버맵(Hovermap)을 개발하고 있다.

호버맵의 외형은 주위에서 흔히 볼 수 있는 드론과 비슷하다. 하지만 어두운 환경에서도 지형을 속속들이 확인할 수 있는 정교한 라이다 시스템과 충돌방지 센서, 그리고 GPS 등이 탑재되어 있으므로 어디서든지 자율 비행이 가능하다는 장점을 갖고 있다.
에머슨트의 공동 설립자이자 CTO를 맡고 있는 ‘패리드 켄덜(Farid Kendoul)’ 박사는 호버맵의 개발 이유로 자원 채굴과 관련된 호주의 지형을 꼽았다.
켄덜 박사는 “호주는 자원이 풍부한 관계로 노천에서 바로 채굴하는 경우가 많지만, 특정 자원의 경우는 지하 깊숙이 있는 자원을 채굴해야만 한다”라고 소개하며 “수많은 지하 갱도를 파고 검사하는 작업을 사람이 하다 보면 붕괴나 유독 가스 발생과 같은 사고의 위험을 감수해야만 할 때가 많다”라고 지적했다.
켄덜 박사의 주장처럼 호버맵이 제대로 된 임무를 수행할 수 있는지를 검증하기 위해 최근 현장 테스트가 진행되었다. 지하 600m 갱도에서 이뤄진 검증 작업 결과, 호버맵은 협소 공간에서도 충분히 자율 비행을 할 수 있다는 점을 입증했다.
이 같은 결과에 대해 켄덜 박사는 “자원 채굴에 도움을 줄 수 있는 용도로 개발된 호버맵이지만, 갱도에서 사고가 발생하여 붕괴 위험이 있을 경우, 사람이 직접 들어가지 않아도 내부 상황을 파악하고 생존자의 존재 역시 확인할 수 있을 것”이라고 기대했다.
광산에서 3차원 지형도 파악에 드론 활용
호버맵이 갱도나 동굴을 비행하며 사람에게 제공하는 가장 중요한 정보는 협소공간에 대한 ‘3차원 지형도’다. 협소공간이 어떻게 생겼는지를 알게 되면, 자원이 어느 곳에 더 많이 매장되어 있고, 취약한 구조는 어느 곳인지를 파악할 수 있기 때문이다.
실제로 호주의 금광업체인 노던스타리소시스(Northern Star Resources)는 서부지역에 위치한 자사의 광산에서 드론이 파악한 3차원 지형도를 이용하여 금광석을 캐고 있다.
발파를 통해 초기 갱도가 완성되면 드론이 갱도로 내려가 3차원 지형도를 그린 다음, 이를 지상에 있는 관리자에게 제공한다. 이후 관리자는 해당 지형도를 바탕으로 금광석이 더 많이 매장되어 있는 지역을 조사한 뒤, 작업자들을 그 곳으로 보내 채굴하는 작업을 진행한다.
이에 대해 노던스타리소시스의 관계자는 “갱도 발파 작업을 하는 이유는 어느 지역에 광물이 더많이 분포되어 있는지를 파악하기 위해서인데, 문제는 발파로 새롭게 생긴 초기 갱도를 인간이 직접 들어가 조사하기에는 큰 위험이 따른다는 점”이라고 지적했다.
관계자의 설명에 따르면 대다수의 광산업체들은 이 같은 위험을 피하기 위해 기다란 막대에 레이저 맵핑 장치를 부착한 다음, 최대한 깊숙하게 동굴까지 밀어넣는 방법을 사용한 것으로 나타났다. 하지만 막대에 부착한 레이저 장치로는 갱도 내부의 정보를 제대로 포착하기가 힘들다는 것이 전문가들의 의견이다.
반면에 드론을 사용하면 이런 문제점이 해소된다. 드론의 정찰 결과에 따라 일부 지역을 추가로 발파해야 할지, 또는 작업자가 투입되어도 안전한지를 결정할 수 있는 것이다.
이와 관련하여 에머슨트의 켄덜 박사는 “투입하는 드론의 수가 여러 대일수록 동시에 지형도를 작성하면서 더 안전하고 효과적인 3차원 지형도 작성이 가능해진다”라고 설명하며 “호버맵이 상용화된다면, 노던스타리소시스의 경우처럼 드론을 활용하여 사고를 방지하고 업무를 효율적으로 추진하는 것이 가능해질 것”이라고 기대했다.
- 김준래 객원기자
- stimes@naver.com
- 저작권자 2018-11-22 ⓒ ScienceTimes
관련기사