‘극과 극은 통한다’라는 말이 로봇 개발에도 적용되고 있다. 점점 사람의 모습을 닮아가는 로봇을 개발하는 것이 세계적 추세인 상황에서, 최근 들어 이와는 정반대로 상상조차 할 수 없는 괴상한 모양의 로봇들도 대거 등장하고 있어 관심을 끌고 있다.
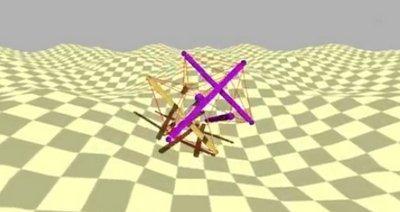
▲ 골격으로만 이루어진 빨랫대 모양의 로봇 'Super Ball Bot' ⓒNASA
과학기술 전문 매체인 phys.org는 미 항공우주국(NASA)이 향후 행성이나 위성 등을 탐사할 목적으로 지금까지의 로봇 모습과는 거리가 먼 골격 형태의 이색적인 로봇을 개발 중에 있다고 보도하면서, ‘슈퍼 볼봇(Super Ball Bot)’이라 명명된 이 탐사 로봇이 행성 탐사의 새로운 방향을 제시해 줄 것이라고 예상했다.
막대와 케이블로만 이루어진 우주탐사 로봇
NASA가 공개한 슈퍼 볼봇의 이미지를 보면 로봇의 생김새가 매우 독특한 것을 알 수 있다. 마치 조립하다가 만 둥근 빨랫대 모양의 블럭 장난감이 통통 튕기며 움직이는 모습을 하고 있는데, 한편으로는 구조를 자유롭게 변화하는 모습이 영화 트랜스포머에 등장하는 로봇을 연상시키기도 한다.
슈퍼 볼봇은 단단한 재질의 막대와 유연한 케이블을 기본으로 구성돼 있다. 각각의 막대는 자체적으로 밀었다 당겼다를 반복하면서 모든 방향과 장애물을 통과해 목표까지 로봇을 이동시킬 수 있고, 케이블은 모터와 연결되어 로봇의 형태를 주위 환경에 맞게 변경시키며 오랜 시간 탐험이 가능하도록 해주는 역할을 한다.
NASA 연구진의 발표에 따르면, 슈퍼 볼봇은 1m에 달하는 크기에도 무게는 수 kg에 불구하며 장애물을 넘어서 어느 방향으로든 갈 수 있으며, 착륙 시에도 자체적으로 충격을 흡수하기 때문에 우주 탐사선의 무게를 경량화할 수 있는 장점을 갖고 있다.
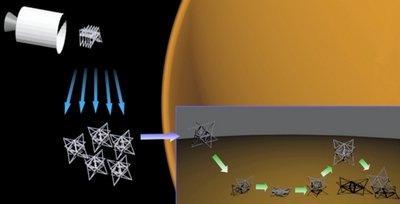
NASA는 최근 행성 탐사와 관련한 보고서를 공개했다. 이 보고서에 의하면 슈퍼 볼봇과 같은 탐사 전문 로봇에 대한 NASA의 개발 방향이 경량이나 저비용과 같은 항목들을 탐사 목표에서 점점 더 강조하고 있는 경향을 보이고 있는 것을 알 수 있다.
▲ Super Ball Bot은 경량과 저비용을 추구하는 NASA의 개발방향과 일치하는 탐사로봇이다 ⓒNASA
왜냐하면 현재의 탐사 로봇 디자인이 대부분 충격력을 최소화하고 로봇이 적절한 중심을 잡도록 낙하산이나 역추진로켓, 그리고 충격방지용 풍선과 같은 장치의 결합을 요구하고 있는데, 이러한 상황에서 유연하고 변형 가능한 로봇을 개발한다면 태양계를 더 단순하고 저렴하게 탐사할 수 있기 때문이다.
이와 관련하여 보고서 저자 중 한 명인 데이비드 앗킨슨(David Atkinson) 박사는 “우리가 개발 중인 로봇은 태양계 탐사에 있어 가장 이상적인 모델이라 할 수 있다”며 “몇 kg 정도의 무게밖에 나가지 않는 소형이면서도, 접힐 수 있기 때문에 발사 중에는 최대한 접힌 채로 안전하게 포장되어 있다가 최종 목적지에 도착해서는 신속하게 펼쳐지면서 조립될 수 있다"고 말했다.
현재 연구진은 슈퍼 볼봇의 실제 탐사를 위해 우선 행성의 표면에 떨어지게 될 때 몸체를 휘어지도록 하여 충격력을 흡수하도록 만들고 또한 표면에 도착하게 되면 효과적으로 이동하면서도 험한 지형을 만나게 될 때 여기서 쉽게 탈출할 수 있는 기능을 부여하기 위한 연구에 집중하고 있는 것으로 알려졌다.
그러나 일부 탐사 전문가들은 슈퍼 볼봇이 막대와 케이블로만 구성되어 있어 내구성이 매우 취약하고, 케이블과 막대가 엉킬 가능성도 높다고 지적하고 있다. 그리고 무엇보다 큐리오시티나 오퍼튜니티 같은 로봇들은 다양한 탐사 장비를 갖추고 있지만 슈퍼 볼봇은 이들을 탑재할 몸체가 없기 때문에 본격적인 탐사 용도로는 활용하기 어려울 것으로 예상하고 있다.
모서리로 설 수 있는 이색 로봇도 등장
미래의 우주 탐사를 위해 개발되고 있는 로봇 중에 이색적인 모양을 하고 있는 로봇이 슈퍼 볼봇만 있는 것은 아니다. 스위스연방공과대(ETH)의 과학자들이 개발하고 있는 큐블리(Cubli)라는 이름의 로봇도 만만치 않은 모습을 갖고 있는데 그냥 정육면체의 큐브 형태로 이루어져 있다.
흔히 탐사 로봇이라면 바퀴나 다리가 있어 이를 통해 이동하는 것이 상식이다. 그러나 큐블리의 경우는 다리나 바퀴는 커녕 어떠한 돌출 부위도 없는 네모반듯한 모양이기 때문에 탐사용 로봇이라고는 선뜻 생각하기 어려울 정도로 단순한 구조로 이루어져 있다.
하지만 큐블리는 가로, 세로, 높이가 각각 15cm인 소형의 몸체를 가지고도 스스로 회전하거나 점프를 할 수 있다. 3개의 면에 각각 설치된 반작용 바퀴(reaction wheel)가 큰 각속도(Angular velocity)로 회전하다가 갑자기 제동하면서 자신의 몸을 회전하거나 점프하도록 만든다.
▲ 큐블리는 모서리로 설 수 있고 스스로 균형을 잡는 로봇이다 ⓒETH
그리고 큐블리의 가장 큰 특징으로는 꼭짓점 하나로 균형을 잡을 수 있다는 점을 들 수 있다. 큐블리는 한쪽 방향으로 기울여도 넘어지지 않고 균형을 잡을 수 있는데, 이것이 가능한 이유는 모서리로 서 있는 위치에서 균형을 잡도록 제어된 모터 토크가 장착되어 있기 때문이다.
특히 이 모터 토크는 균형을 잡는 것뿐만 아니라 원할 때 큐블리가 임의의 방향으로 바닥에 떨어지도록 제어된 낙하를 달성하는 데에도 이용될 수 있기 때문에, 미래의 행성 탐사에도 중요하게 사용될 것으로 여겨지고 있다.
이 외에도 ETH의 연구진이 밝힌 자료에 따르면 큐블리 안에는 센서와 배터리, 그리고 프로세서가 설치되어 있는데, 이들과 함께 리액션휠이 작용하면서 일정한 각속도를 얻게 되면 이 각운동량(Angular momentum)을 큐브 본체로 전달해 한쪽 방향으로 움직이도록 설계되어 있는 것으로 나타났다.
큐블리의 동작 원리에 대해 ETH의 관계자는 “고속으로 돌던 리액션휠이 갑자기 정지하면 각운동량 보존 법칙에 의해서 이 각운동량이 큐브 본체에 전달되면서 움직이게 된다”고 설명하면서 “자동차나 자전거의 경우도 마찬가지 원리이지만, 자동차나 자전거는 각운동량 변화에 뒤집히지 않을 만큼 무거운 반면에 큐블리는 가볍기 때문에 움직이게 되는 것”이라고 덧붙였다.
 뉴스레터
뉴스레터