 뉴스레터
뉴스레터








자율 비행과 회피 기동이 가능한 비행 로봇이 하늘을 날았다.
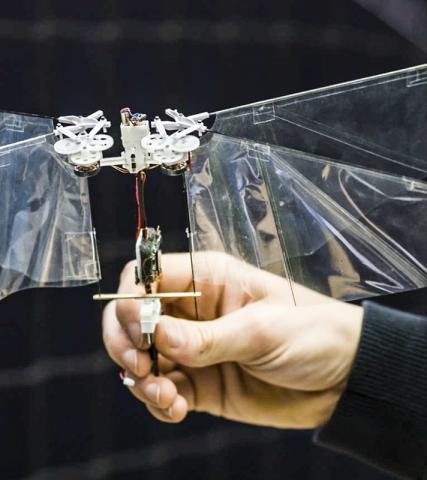
네덜란드 델프트 과학기술대(TU Deft) 미세 비행체 연구소(MAVLab) 연구원들이 곤충에서 힌트를 얻어 개발한 새로운 비행로봇 ‘DelFly Nimble’이 그 주인공.
이 비행로봇이 과학저널 ‘사이언스’(Science) 14일자 표지를 장식했다.
연구팀은 네덜란드 바헤닝헨(Wageningen) 대학ᆞ연구소(WUR)와 협동으로 이 비행 로봇에 대해 처음으로 자율 비행 및 민첩한 날개짓 시험을 수행했다.
그 결과, 로봇의 모델이 된 초파리가 어떻게 공세적 탈출 기동을 조정하는가를 새롭게 이해하는 성과를 올렸다.
아울러 로봇의 탁월한 비행 성능은 곤충 비행 연구에서의 잠재력 외에도 새로운 드론 응용 분야의 문을 열었다. 관련 동영상

날아다니는 동물들은 날개를 펄럭임으로써 힘을 얻고 통제 비행을 할 수 있다. 곤충 같은 작은 천연 비행체는 날개짓을 통해 꽃에 다가가고 신속하게 위험 회피 비행을 할 수 있다.
우리가 파리를 찰싹 때려서 잡으려고 할 때 이를 피해 달아나는 파리의 모습에서 그런 움직임을 확인할 수 있다.
동물의 비행은 언제나 생물학자들의 관심을 끈다. 학자들은 이들의 복잡한 날개 운동 패턴과 공기역학뿐만 아니라 그렇게 재빨리 기동하는 동안의 감각과 신경-운동 시스템도 연구대상으로 삼고 있다.
최근에 비행 동물들은 로봇 연구가들에게 영감의 원천으로 떠올랐다. 연구가들은 재빠르고 전력 효율이 높으며 곤충 크기로 경량화할 수 있는 가벼운 비행 로봇 개발을 위해 벌과 파리 등 많은 ‘천연 비행체’들에서 힌트를 얻고 있다.
고도로 민첩한 새 비행 로봇
MAVLab 연구팀이 곤충에서 영감을 얻어 개발한 새 비행 로봇은 성능에서 크게 앞서고 간단하며, 만들기 쉬운 디자인이 적용됐다.
날아다니는 곤충과 마찬가지로 이 비행 로봇의 날개는 초당 17번을 펄럭임으로써 공기 중에 떠있는데 필요한 양력을 생성하고, 미세한 날개 동작 조정을 통해 비행 제어가 가능하다.
초파리에서 힌트를 얻은 이 비행로봇은 허공에 멈춘 채 떠 있기도 하고, 어느 방향으로든 매우 재빠르게 움직임으로써 효과적인 제어 메커니즘을 갖췄다는 것을 입증했다.
논문 제1저자이자 비행로봇의 주 디자이너인 마테이 카라섹(Matěj Karásek) 연구원은 ‘로봇은 최고속도가 25km/h이고, 360도 뒤집기나 공중제비, 연속 횡전(barrel rolls)같은 공격적 기동까지 수행할 수 있다’고 밝혔다.
또한 무게 ‘29g에 날개 폭 33cm로 크기에 비해 전력 효율성이 탁월하고, 완전 충전된 배터리로 5분간 공중 비행을 하거나 1km 이상 비행할 수 있다’고 소개했다.

파리의 회피 기동 연구
이 로봇의 비행 성능은 새로운 자율 마이크로-드론으로서의 기능뿐 아니라 다양한 비행 프로그램을 짜 넣을 수 있어 곤충 비행 연구에도 적합하다.
연구팀은 이런 프로그램을 만들기 위해 바헤닝헨 대학팀과 협력했다. 바헤닝헨 대학ᆞ연구소 실험동물학 그룹 플로리안 무이레스(Florian Muijres) 교수는 ‘로봇이 나는 것을 처음 봤을 때 기동 비행 모습이 곤충과 꼭 닮아서 놀랐다’며, ‘즉각 이 로봇을 곤충들의 비행 제어와 비행 역학을 연구하는데 채용할 수 있을 것이라고 생각했다’고 말했다.
연구팀은 무이레스 교수가 이전에 초파리에 대해 연구한 바에 따라 로봇이 초파리의 가상 제어 행동, 즉 우리가 초파리를 때려잡으려 할 때 이를 피하기 위해 고도로 민첩한 회피 기동(high-agility escape manoeuvres)을 할 때의 행동을 모방하도록 프로그래밍했다.
이렇게 프로그래밍한 로봇의 기동 비행은 초파리에서 관찰된 것과 매우 흡사했다. 초파리가 회피 행동을 최대화하기 위해 회전각을 어떻게 조절하는지를 보여줄 수 있을 정도였다.
카라섹 연구원은 ‘동물 실험과 달리 우리는 로봇의 “두뇌”에서 일어나는 일을 완전히 통제할 수 있다’고 말했다. 그는 ‘이를 통해 우리는 초파리를 비롯한 다른 비행동물들이 빠른 선회 비행 중에 방향을 조정하도록 돕는 새로운 수동적 공기역학 메커니즘을 식별해 기술할 수 있었다’고 덧붙였다.

미래의 응용 가능성
MAVLab은 DelFly 프로젝트를 통해 10년 이상 곤충에서 힌트를 얻은 비행 로봇을 개발해 오고 있다.
MAVLab의 과학부문 리더인 기도 데 크룬(Guido de Croon) 교수는 ‘곤충에서 영감을 얻은 비행체는 가볍고 사람에게 안전하며, 특히 작은 규모에서는 전통적인 무인 비행체(드론)보다 더 효율적으로 비행할 수 있기 때문에 새로운 응용 가능성이 매우 높다’고 말했다.
그러나 지금까지 비행로봇이 큰 주목을 받지 못한 것은 이번에 개발한 DelFly II처럼 민첩하지 못 하거나 제조공정이 너무 복잡했기 때문이라는 것이다.
이번 연구에서 소개된 ‘DelFly Nimble’이란 이름이 붙은 이 로봇은 이미 확립된 제조 방법으로 제작되었고, 기성 부품을 사용한데다 비행 내구성이 실제 응용이 가능할 만큼 길다는 장점이 있다.
DelFly Nimble’은 네덜란드 과학재단(NOW)이 지원하는 델프트 과학기술대와 바헤닝헨대의 협동 프로그램인 TTW 프로젝트 안에서 ‘벌처럼 민첩하게(As nimble as a bee)’란 모토 아래 추가 개발이 계속될 예정이다.
- 김병희 객원기자
- hanbit7@gmail.com
- 저작권자 2018-09-14 ⓒ ScienceTimes
관련기사










