 뉴스레터
뉴스레터








사람은 부상을 당하더라도 아주 심각한 상황이 아니라면, 조금씩 움직이거나 걸을 수 있다. 이는 포유류 동물들도 마찬가지다. 한쪽 다리에 상처를 입거나 다리가 아예 없더라도, 나머지 다리를 이용하여 걸을 수 있다.
그러나 로봇이라면 이야기가 달라진다. 아무리 최고 성능의 로봇이라도 지금까지의 기술 수준으로는 외부로부터 손상을 입었을 때 제대로 작동할 수 없었다. 미래의 로봇 역할이 탐사 및 구조 등의 임무에 집중 투입될 것으로 예측되고 있는 상황에서, 이 같은 문제는 로봇의 진화를 막는 치명적인 단점이 될 수밖에 없다.
최근 프랑스와 미국의 과학자들이 손상을 입은 상태에서도 수 분 만에 손상된 부분을 복원하여, 자신에게 주어진 역할을 계속 수행할 수 있는 로봇을 개발하고 있는 것으로 알려져 이목이 집중되고 있다.
과학기술 전문 매체인 '피스오알'지(phys.org)는 5월 27일자 기사를 통해 로봇을 개발하는 과학자들이 모델로 삼고 싶어 하는 대상은 무생물이 아니라 생물이라고 보도하면서, 프랑스와 미국의 공동 연구진이 동물 및 곤충을 모방한 자가복원 로봇을 선보일 예정이라고 밝혔다. (전문 링크)
부상 발생 시 나타나는 동물과 로봇의 차이
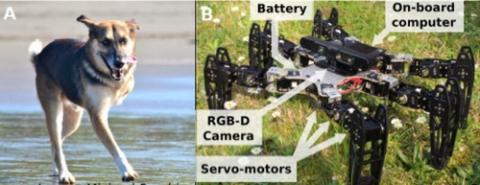
프랑스의 피에르 및 마리퀴리 대학 출신인 앙투안느 큘리(Antoine Cully) 박사와 장-밥티스테 무레(Jean-Baptiste Mouret) 박사는 미 와이오밍대의 연구진과 협력하여 이번 연구를 이끌었다.
큘리 박사는 “로봇은 사람이나 동물처럼 신체 일부가 손상되었을 때, 이 같은 상황에 잘 대처하지 못한다”라고 언급하며 “예를 들어 개나 고양이는 다리 하나가 다쳐도 나머지 3개의 다리로 걸을 수 있지만, 로봇의 경우는 다리가 고장 나면 나머지 다리도 이용할 수 없게 된다”라고 말했다.
그는 “우리가 연구하는 로봇에게 가장 필요한 것은 로봇 스스로가 무엇이 잘못되었는지를 스스로 깨닫게 만드는 것”이라고 전하며 “로봇 스스로 잘못된 점을 알고 이를 극복하기 위해, 다양한 옵션들 가운데 하나를 선택하도록 만드는 알고리즘 개발에 주력했다”라고 밝혔다.
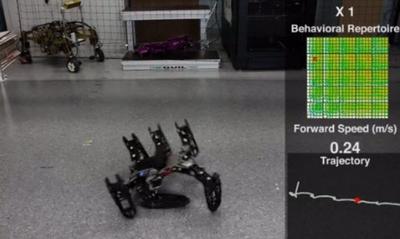
큘리 박사의 설명에 따르면 로봇에게 제공하는 알고리즘은 자신이 보행하는 것을 방해하는 요인이 부서진 외골격인지, 아니면 손상된 회로인지 등을 인지하는 과정을 의미한다. 연구진은 이를 위해 보행이 어려워지는 상황이 발생하면, 로봇이 시행착오(trial and error) 과정을 수행하도록 만들었다.
연구진은 이 같은 원리로 개발된 알고리즘을 테스트용 로봇에 적용하였고, 그 결과 테스트용 로봇은 손상을 당하기 전에 할 수 있었던 것과 거의 같은 속도로 빠르게 걸을 수 있음을 확인했다. 또한 손상 정도가 부분적이거나 혹은 완전히 손상되었더라도 각 상황에 맞게 적절하게 동작한다는 점도 파악했다.
연구진은 “이러한 접근 방법이 동물들이 수행하는 것과 매우 유사하다”고 평가하면서 “알고리즘을 우리가 개발한 것은 맞지만, 생명체에서 영감을 받은 만큼 이 기술을 ‘지능적인 시행오차(Intelligent Trial and Error)’라고 명명했다”라고 전했다.
지능적 시행오차 기술로 자가복원하는 로봇
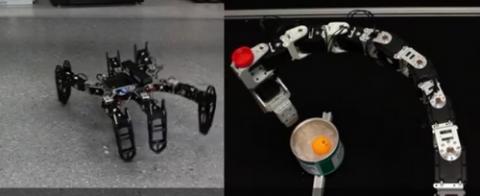
연구진이 최근 공개한 로봇은 두 가지 종류로서, 하나는 곤충처럼 6개의 다리를 지닌 로봇이고, 다른 하나는 여러 개의 관절을 지닌 팔 같은 로봇이다. 연구진은 이 로봇들이 일부 관절을 사용하지 못하더라도 바로 이전과 거의 비슷하게 작동할 수 있는 능력을 부여했다.
테스트 결과를 알려주는 동영상에서 6족 로봇은 다리 2개가 파손되었어도 보행을 지속할 수 있도록 적응한 모습을 보여 주었다. 또한 이 동영상에서는 손상된 모터를 가지고 있는 로봇 팔이, 옮겨야 할 물체를 정확하게 위치시키는 법을 어떻게 수행해 나가는지도 알려 주었다.
이 같은 결과와 관련하여 클루네 박사는 “우리가 개발한 로봇은 만약 하나의 거동이 적합하지 않으면, 거동의 전체 형태를 배제하고 새로운 형태를 시도할 정도로 영리하다”고 소개하며 “예를 들어, 주로 뒷다리를 이용할 때 보행이 잘 되지 않으면 로봇은 다음에 보행할 때는 주로 앞다리를 이용하여 보행을 시도했다”라고 설명했다.
여기서 놀라운 것은 로봇이 새로운 보행법을 매우 빠르게 배운다는 점이었다. 로봇이 심각한 손상을 입어서 허우적거리는 상태로 있다가, 약간 절름거리기는 하지만 효율적으로 걷는 상태로 전환되기까지 약 2분 정도 밖에 걸리는 않은 것으로 나타났기 때문이다.
이에 대해 클루네 박사는 “예전의 로봇들이었다면 상상도 할 수 없었던 일”이라고 강조하며 “이런 상황을 가능하게 만드는 지능적인 시행오차 기술은 로봇이 새로운 환경에 적응하는 것은 물론, 예측되지 않는 상황에 적응하는 데에도 적용될 것”이라고 덧붙였다.
업계에서는 자가복원 기술이 적용된 로봇이 앞으로 재난 구조나 우주 개척은 물론, 전투 현장 등에 까지 투입될 것으로 전망하고 있다. 특히 아픈 사람이나 부상자를 돌보는 것처럼 필수 안전 기능을 수행하거나, 아바타처럼 사람이 해야 할 일을 대신해줄 도우미 등의 업무에 가장 많이 활용될 것으로 기대하고 있다.
- 김준래 객원기자
- stimes@naver.com
- 저작권자 2015-06-12 ⓒ ScienceTimes
관련기사
