 뉴스레터
뉴스레터








세포 하나를 잡았다 놓아줄 수 있는 정도로 섬세한 작업을 하는 로봇이 개발됐다. 한 변의 길이가 10㎛(마이크로미터·1㎛=100만 분의 1m)인 큐브(정육면체) 입자를 다양한 형태로 조립하는 방식으로 만든 것이다.
노스캐롤라이나주립대와 듀크대 등 미국 연구진은 이런 로봇을 5일 국제학술지 '사이언스 어드밴스'(http://advances.sciencemag.org/content/3/8/e1701108.full)에 발표했다.
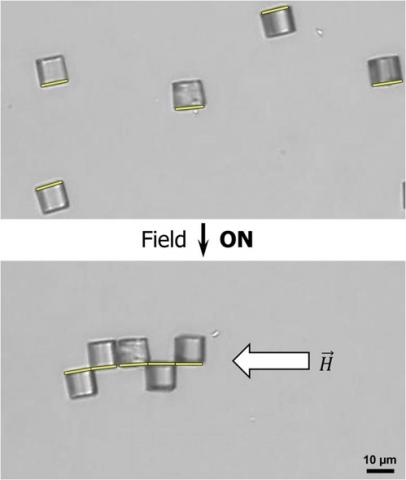
연구진은 고분자 큐브 입자의 한쪽 면에만 마이크로 크기의 자석을 삽입하는 방식으로 큐브 입자들이 자석 면을 따라 스스로 조립되도록 유도했다.
조립된 로봇은 외부 자기장에 반응, 스스로 구조를 변형했다. 큐브 입자의 배열 형태나 개수에 따라 기능도 다양해진다.
예를 들어 게임 '팩맨'(PAC-MAN)의 캐릭터처럼 입을 벌렸다 닫는 것처럼 행동하는 모양으로 만드는 것도 가능하다.
연구진은 실제로 큐브 입자를 이렇게 배열해 입을 여닫는 속도를 0.5초 수준에서 조종할 수 있음을 광학현미경으로 확인했다.
또 이 로봇 조립체로 살아있는 세포를 포획, 운반하는 데도 성공했다. 여러 세포가 섞여 있을 때 특정 유형의 세포만 선택적으로 분리해 낼 수 있는 가능성을 본 셈이다.
최근의 로봇 연구는 크게 유연한 작업에 특화된 '소프트 로봇'과 미세한 작업을 수행할 수 있는 '마이크로 로봇'을 중심으로 진행 중이다.
그러나 전자의 경우 소형화, 후자의 경우 유연화에 어려움을 겪어왔다. 이를 해결할 방안 중 하나로 이번 연구에서 마이크로 입자를 '소프트 로봇'의 형태로 조립하는 아이디어를 제시했다는 게 연구진의 설명이다.
논문의 1저자인 한구희 미국 노스캐롤라이나주립대 연구원(박사과정생)은 "이번 연구는 용액 속에 분산돼있는 입자들간 상호 작용의 방향성을 제어해 원하는 형태의 조립체를 만들고 그 구조를 변경하는 데서 착안했다"고 설명했다.
이어 "이 원리는 입자 및 외부 자극에 종류에 따라 확장할 수 있으므로, 앞으로 더 다양한 구조 및 기능성을 가진 조립체들이 보고될 것으로 기대한다"고 덧붙였다.
- 연합뉴스 제공
- 저작권자 2017-08-07 ⓒ ScienceTimes
관련기사
