 뉴스레터
뉴스레터








‘생체모방(biomimetics)’은 자연을 닮고 싶어 하는 인간의 노력이 소재나 기계장치 등으로 구현된 기술을 말한다. 연잎에서 아이디어를 딴 방수소재나 물총새의 부리를 본떠 만든 초고속 열차 등 생체를 모방한 사례들은 주위에서 흔히 볼 수 있는데, 그중에서도 생체모방 사례의 단골손님으로 등장하는 대상이 있다. 바로 ‘벌새’다.

새 중에서도 가장 작은 몸체를 가진 벌새는 독특한 어깨근육과 날개 구조를 갖고 있어서 효율적인 비행을 하는 것으로 유명하다. 초당 80~100회에 이르는 빠른 날갯짓으로 다른 새들과는 달리 공중에서 정지할 수 있으며, 전후좌우를 순간적으로 날 수 있는 특징을 갖고 있다. 벌새만의 독특한 날갯짓이 양력과 추진력을 적절히 제어하기 때문에 가능한 일이다.
이처럼 고난도의 날갯짓을 지니고 있다 보니 많은 과학자들이 오래전부터 벌새를 모방한 비행로봇을 개발해 왔다. 전통적인 유체역학 기반의 로봇부터 시작하여 인공지능이 장착된 로봇까지 그 시대를 대표하는 기술이 모두 벌새로봇에 반영되었기 때문에, 벌새로봇의 진화는 비행로봇의 역사와 그 궤를 같이 한다고 볼 수 있다. (관련 기사 링크)
벌새의 근육과 날개가 독특한 날갯짓 가능하게 만들어
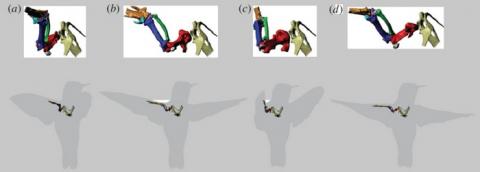
벌새로봇의 원조는 캐나다 브리티시컬럼비아대와 독일 프레이브루그대의 과학자들로 구성된 공동 연구진이 개발한 ‘허밍버드(hummingbird)’다.
이들 공동 연구진은 총 207마리의 벌새를 활용하여 체질량과 최대 방향 전환 각도, 그리고 회전 능력 및 평균 속도 등 비행과 관련된 모든 행동을 종합적으로 분석했다. 또한 개체별 벌새의 근육 크기나 신경구조 같은 신체적 특징과 연계된 비행능력도 상세하게 조사했다.
그 결과, 공동 연구진은 벌새의 비행 행동 패턴 중 65%가 형태학적 특징과 연계되어 있음을 확인했다. 벌새가 순간적인 가속도를 낼 수 있는 것은 근육량과 가장 관련이 컸으며, 빠른 회전과 방향 전환 능력은 날개 형태 때문이라는 것이 연구의 결론이었다.
허밍버드 개발의 책임자인 브리티시컬럼비아대 동물학과의 ‘로슬린 다킨(Roslyn Dakin)’ 박사는 “벌새의 날개 모양은 방향 전환과 회전 능력을 개량하기 위해 진화했고, 근육은 새들이 낼 수 있는 최대 가속도를 높이기 위한 방향으로 발전했다”라고 밝히며 “이 같은 분석 결과를 로봇에 최대한 반영했다”라고 말했다.
그러면서 “벌새 모양과 행동에 근거한 진화 과정 분석법을 보다 큰 조류에도 적용한다면, 해당 조류의 장점을 가진 비행로봇을 개발할 수 있을 것”이라고 전망했다.
이들의 연구와 비슷한 시기에 일본 지바대학에서도 벌새를 닮은 비행로봇을 개발한 사례가 있다. 이 대학의 ‘류 히로시(Ryu Hiroshi)’ 교수는 벌새로봇을 개발한 이유에 대해 “날개 길이가 10cm이고 무게는 2.55g에 불과해서 무너진 빌딩에 갇힌 사람을 찾거나, 범죄자 수색 등 다양한 용도로 사용할 수 있기 때문”이라고 밝혔다.
류 교수의 설명에 따르면 연구진이 개발한 비행로봇은 실제 벌새와 비슷하게 초당 30번씩 날갯짓을 할 수 있도록 초소형 미니 모터가 장착되어 있는 것으로 나타났다. 또한 2차 전지를 사용하여 최대 6분 정도 비행할 수 있다는 것이 지바대 측의 설명이다.
류 교수는 “벌새로봇이 가진 4개의 날개는 폴리에틸렌으로 만들어졌는데, 헬리콥터 형태의 비행로봇보다 더 내구성이 강해서 충돌이나 진동 같은 물리적 현상이 발생하는 재난 현장에서 활약할 수 있다”고 소개했다.
실제 벌새처럼 정지비행이 가능한 로봇
브리티시컬럼비아대와 지바대의 벌새로봇들이 벌새의 구조를 최대로 모방한 전통적 방식으로 개발되었다면, 미 국방성 산하의 고등연구계획국(DARPA)이 선보인 벌새로봇은 나노기술을 접목하여 개발된 첨단 비행체다.
‘허밍봇(hummingbot)’이라는 이름의 이 벌새로봇은 실제 벌새처럼 정지비행이 가능하다는 것이 가장 큰 특징이다. 또한 공중에서 전후좌우로 이동하는 것은 물론, 무게도 10g 미만의 초소형이어서 전투가 벌어지는 곳이라면 눈에 띄지 않게 적진을 탐색할 수 있다.
DARPA에서 벌새로봇 개발을 담당했던 ‘토드 힐튼(Todd Hilton)’ 매니저는 "허밍봇의 개발 목표는 초속 2.5m의 바람에도 영향을 받지 않고 정지비행하는 것과 초속 10m 속도로 나아가며 비행하는 것"이라고 밝혔다.
벌새로봇 개발과 관련한 가장 최근 사례로는 인공지능 기능이 탑재된 비행로봇의 경우를 꼽을 수 있다. 미국 퍼듀대 기계공학과의 ‘덩 시냔(Deng Xinyan)’ 교수와 연구진은 벌새의 민첩한 비행 동작을 컴퓨터 알고리즘으로 변환시켜, 비행로봇이 인공지능의 머신러닝 기능을 통해 벌세의 날갯짓을 배울 수 있도록 했다.

덩 교수는 “기존의 비행로봇들은 전통적 유체역학 방식을 이용하여 설계되었지만, 크기를 너무 소형화하면 양력(揚力)을 만들어 낼 수 없는 한계에 봉착했다”라고 설명하며 “반면에 우리가 개발한 벌새로봇은 전통적 유체역학으로 날지 않고 머신러닝 기술을 통해 비행한다는 것이 차이점”이라고 강조했다.
덩 교수의 설명에 따르면 퍼듀대 연구진이 개발한 벌새로봇에서 가장 흥미로운 점은 날갯짓을 하도록 사전에 프로그래밍 된 것이 아니라, 머신러닝 알고리즘에 따라 비행 방법을 학습한다는 점인 것으로 나타났다.
다시 말해 다양한 상황에 맞는 비행 방법을 스스로 학습할 수 있다는 의미다. 덩 교수는 “아무리 정교하게 비행 과정을 프로그래밍 한다 하더라도 실제 벌새의 비행법을 모방하기는 어렵다”라고 지적하며 “따라서 스스로 학습하는 대안을 마련하려는 것”이라고 밝혔다.
연구진은 앞으로 벌새로봇에 배터리를 비롯하여 카메라나 GPS 등 다양한 센서를 장착할 예정인 것으로 드러났다. 덩 교수는 “벌새로봇이 실용화되면 드론이 진입할 수 없는 붕괴된 건물이나 위험한 공간을 수색하는 데 뛰어난 효과를 보일 수 있을 것”이라고 기대했다.
- 김준래 객원기자
- stimes@naver.com
- 저작권자 2019-05-21 ⓒ ScienceTimes
관련기사
